概要: ロボット材料ユニット自動化の応用シナリオを目的として、YueQing Technology が開発した家庭用ロボット オフライン プログラミング ソフトウェアである iRobotCAM は、便利な材料ユニット設計モジュールを提供し、PLC との通信を迅速に確立し、材料ユニットのニーズに応じて自動化を実現します。
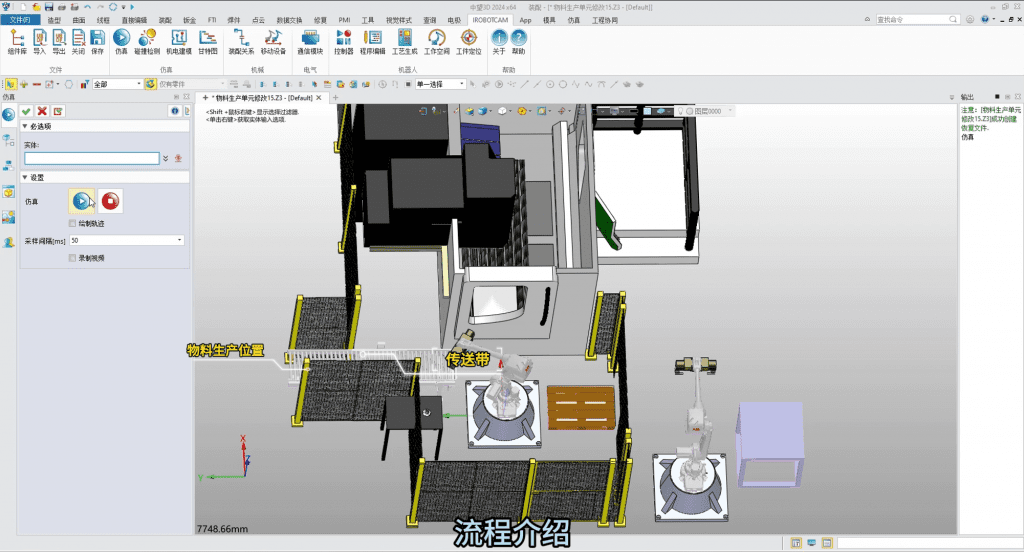
ロボット生産ラインの設計とシミュレーションデバッグの基盤として、材料生産ユニットは様々なコンポーネントの設計手法を簡便に導出しました。原点に立ち返り、全体的な材料フローの観点から見ると、最も基本的な材料シナリオのプロセスは次のようになります。
- シーンでは、コンベア ベルトの入口で材料が生成され、材料が端まで搬送され、端で材料が感知され、コンベア ベルトが停止します。
- 積載エリアのロボットは信号を取得し、材料を工作機械に固定して加工・積載し、最終的にコンベアプレート上に載せて輸送します。
- 荷降ろしエリアのロボットはコンベアプレートが材料を運び出すのを待ち、信号を取得した後、材料を材料配置テーブルにクランプします。
- コンベアベルトの入口では材料の生産が続けられ、ロボットは積み込みと積み下ろしのサイクルに入ります。
機能設計は非常に便利で、資材ユニットは多様な生産ライン向けの資材を自動生成できます。資材生産ユニットの機能ウィンドウは、生産対象、生産場所、生産頻度を組み込むことで構築されます。
機能拡張性は驚異的です。iRobotCAMの強力な物理エンジンは、材料ユニットの要件に合わせて特別に調整されており、より複雑なシナリオでもマルチロボットモーションシミュレーションの要求を満たすことができます。
ロボットの荷積み・荷降ろしのアプリケーションを例に挙げてみましょう。iRobotCAMは、以下の設計を迅速に実現できます。
まず、コンポーネントライブラリからロボットモデルをシーンにインポートし、ロボットツールを個別に設定することでロボットに組み立てます。
次に、ドラッグアンドドロップティーチングによるマーカーの追加とロボットプログラム命令の追加が可能で、ロボットプログラムを制御し、荷積み・荷降ろし機能を実行します。
最後に、複数のロボットをシーンに追加し、マルチロボットコントローラによってロボットプログラム命令を管理することで、荷積み・荷降ろしエリアの機能をそれぞれ実行します。
材料生産ユニットとして、iRobotCAM がロボット材料ユニットの自動化をいかに便利に実現するかを次のビデオでさらに詳しく説明します。
Yueqing Technologyについて
Yueqing Technology は、生産ラインの電気機械概念設計、ロボット処理プログラミングシミュレーション、仮想デバッグを統合したデジタルソリューションであるオープンな iRobotCAM ロボット オフライン プログラミング プラットフォームの構築に取り組んでいます。
iRobotCAM ウェブサイト: www.iRobotCAM.com;


