บทคัดย่อ: การประยุกต์ใช้หุ่นยนต์ร่วมมือช่วยลดภาระงานซ้ำซากจำนวนมากและปรับปรุงประสิทธิภาพการผลิตได้อย่างมาก พื้นฐานของการใช้งานหุ่นยนต์ร่วมมือต่างๆ อยู่ที่การเขียนโปรแกรมและการจำลองหุ่นยนต์ ผ่านซอฟต์แวร์การเขียนโปรแกรมออฟไลน์หุ่นยนต์ในประเทศอย่าง iRobotCAM หุ่นยนต์ร่วมมือ เช่น Yuejiang สามารถนำมาใช้เพื่อการเขียนโปรแกรมหุ่นยนต์และการจำลองเสมือนจริงได้อย่างรวดเร็ว
ด้วยความยืดหยุ่นที่เพิ่มขึ้นของการใช้งานหุ่นยนต์ โดยเฉพาะอย่างยิ่งระดับอิสระที่สูงและความแม่นยำสูงของหุ่นยนต์ร่วมปฏิบัติงาน อุตสาหกรรมต่างๆ รวมถึงการบิน ยานยนต์ และอิเล็กทรอนิกส์ ได้นำหุ่นยนต์ร่วมปฏิบัติงานจำนวนมากมาใช้เพื่อลดภาระงานด้วยมือที่ซ้ำซากและปรับปรุงประสิทธิภาพการผลิตอย่างมาก การเขียนโปรแกรมและการจำลองสถานการณ์การทำงานร่วมกันของหุ่นยนต์ต่างๆ เป็นพื้นฐานของการใช้งานหุ่นยนต์ร่วมปฏิบัติงาน บทความนี้จะแนะนำ iRobotCAM ซึ่งเป็นซอฟต์แวร์การเขียนโปรแกรมออฟไลน์สำหรับหุ่นยนต์ในบ้านที่พัฒนาจากแพลตฟอร์มการสร้างแบบจำลอง CAD 3 มิติ และใช้หุ่นยนต์ร่วมปฏิบัติงาน debot เป็นตัวอย่างเพื่อแนะนำวิธีใช้หุ่นยนต์ร่วมปฏิบัติงาน debot อย่างรวดเร็วเพื่อดำเนินการเขียนโปรแกรมการเชื่อมหุ่นยนต์และการจำลองเสมือนจริง
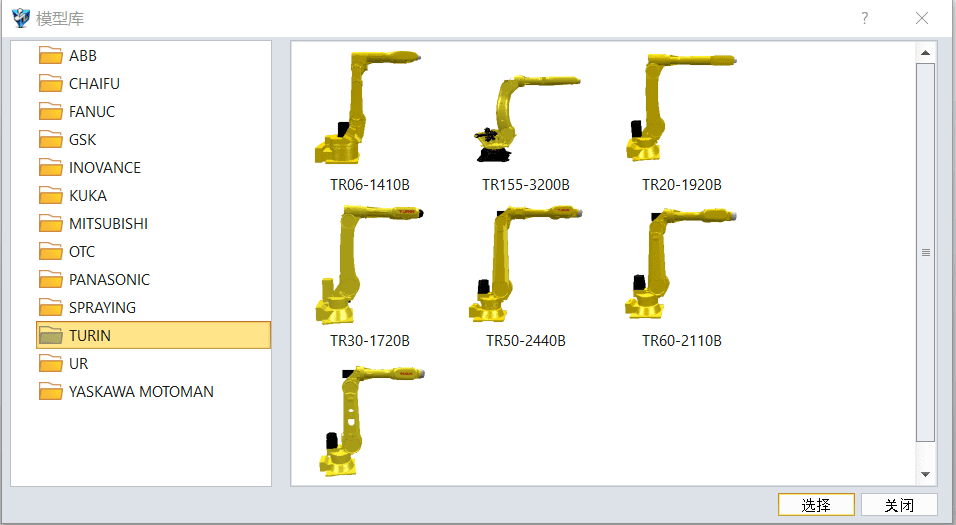
- ด้วยไลบรารีหุ่นยนต์ของ iRobotCAM คุณสามารถใช้ไลบรารีหุ่นยนต์ที่มีอยู่ของ ABB, ZF, FANUC, Guangzhou CNC, Inovance, Kuka, Mitsubishi, Panasonic, Zhihui, Turin, UR, Yaskawa และไลบรารีหุ่นยนต์อื่นๆ หรือสร้างไลบรารีหุ่นยนต์ร่วมมือใหม่ๆ อย่างรวดเร็ว เช่น debot Robotics ตามความต้องการ ไลบรารีนี้สามารถสร้างขึ้นได้โดยใช้คำจำกัดความร่วมง่ายๆ
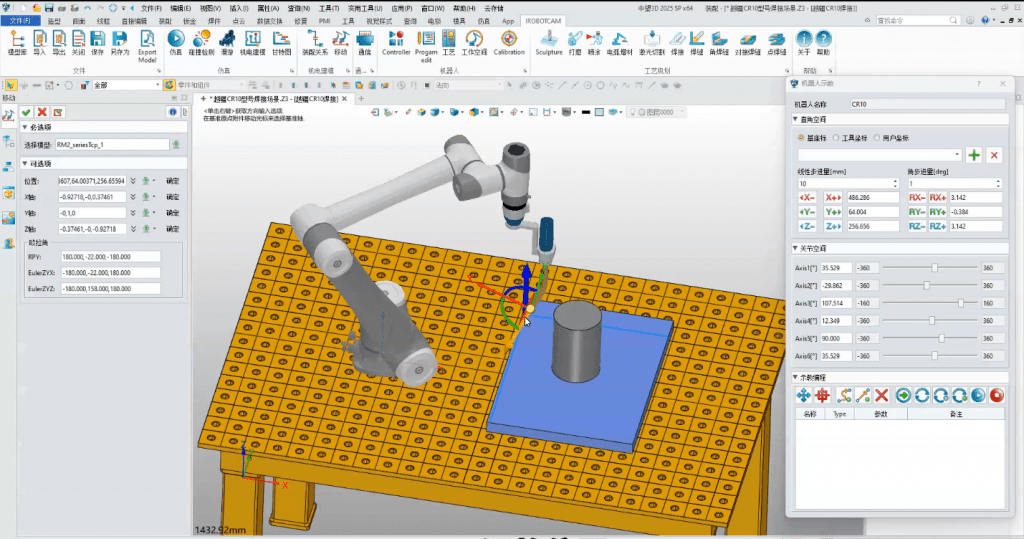
2. ใช้ฟังก์ชันการสอนที่สะดวกสบายของ iRobotCAM เพื่อให้สามารถเขียนโปรแกรมการสอนได้โดยการลากและวาง
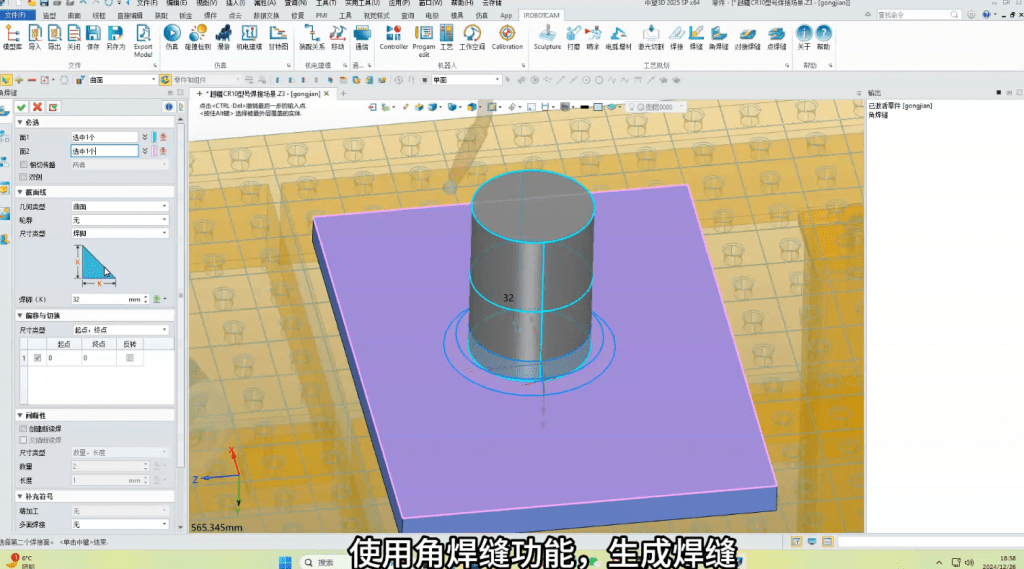
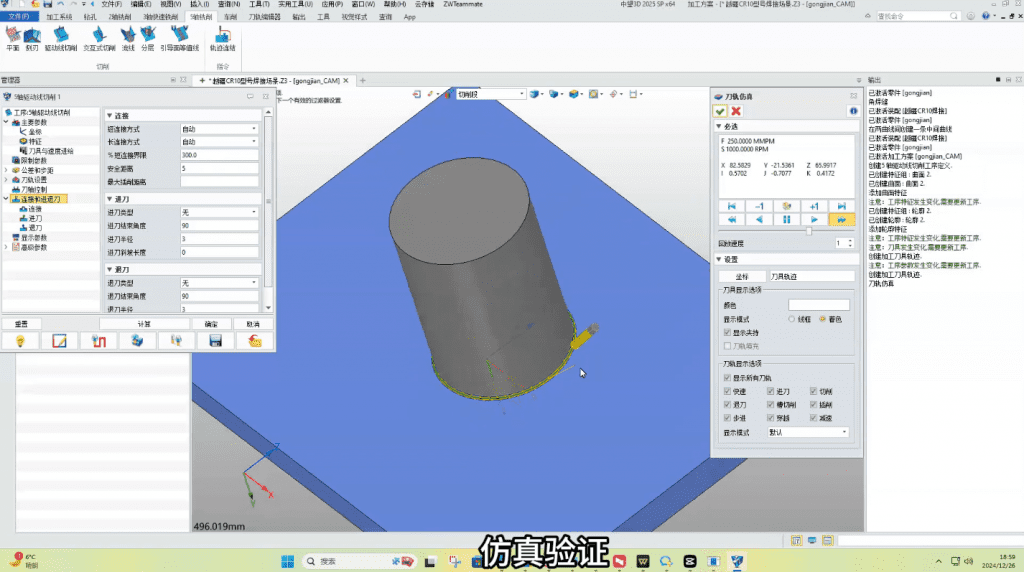
3. การใช้โมดูลการเชื่อมช่วยให้คุณสามารถทำเครื่องหมายตำแหน่งการเชื่อมและสร้างโปรแกรมฟีเจอร์การเชื่อมได้อย่างรวดเร็ว
4. ด้วยการใช้ความสามารถในการกำหนดเส้นทางการเคลื่อนที่ตั้งแต่ 2 ถึง 5 แกนอันหลากหลายของ iRobotCAM คุณสามารถสร้างเส้นทางการเขียนโปรแกรมการเชื่อมและจำลองเส้นทางได้อย่างรวดเร็ว
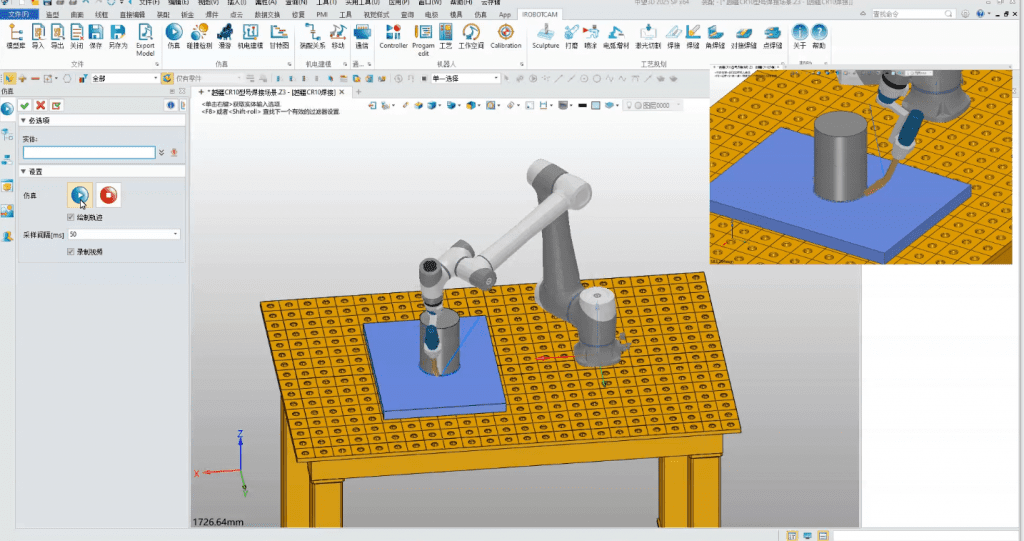
5 การใช้เอฟเฟ็กต์การประมวลผลจำลองหุ่นยนต์ของ iRobotCAM ช่วยให้สามารถตรวจสอบและจำลองเอฟเฟ็กต์การเชื่อมของหุ่นยนต์ได้เพิ่มเติม
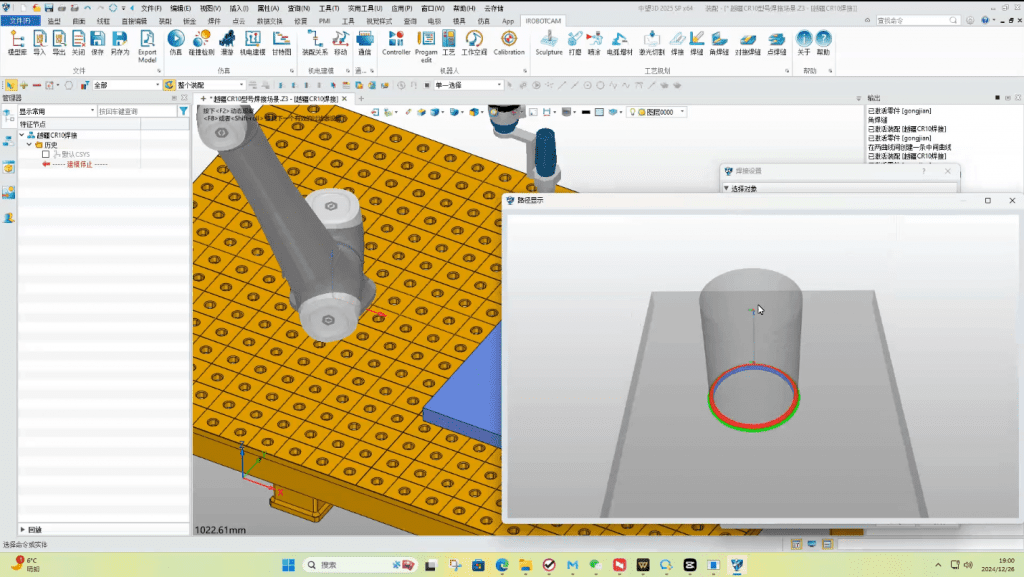
6. สำหรับสถานการณ์การใช้งานหุ่นยนต์ iRobotCAM สามารถใช้จำลองฉากการเชื่อมโดยรวมของหุ่นยนต์และดูกระบวนการเชื่อมได้อย่างเข้าใจง่าย
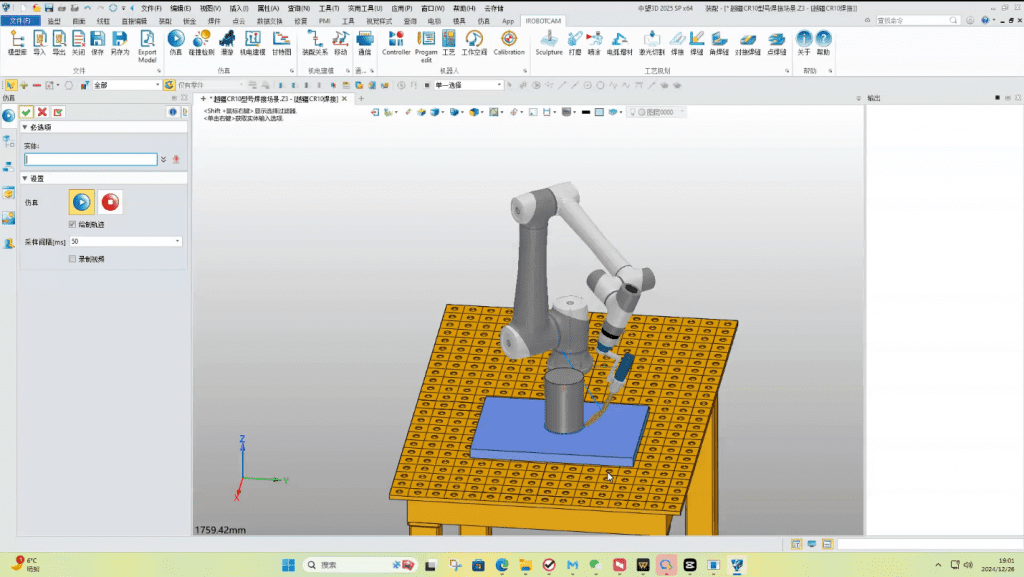
ต่อไปนี้เป็นวิดีโอที่แสดงการเขียนโปรแกรมและการจำลองการเชื่อมโดยใช้หุ่นยนต์ร่วมปฏิบัติงาน Debot
เกี่ยวกับ Yueqing Technology
Yueqing Technology มุ่งมั่นที่จะสร้างแพลตฟอร์มการเขียนโปรแกรมออฟไลน์สำหรับหุ่นยนต์ iRobotCAM แบบเปิด ซึ่งเป็นโซลูชันดิจิทัลที่ผสานการออกแบบแนวความคิดด้านไฟฟ้ากลของสายการผลิต การจำลองการเขียนโปรแกรมการประมวลผลหุ่นยนต์ และการแก้จุดบกพร่องแบบเสมือน
เว็บไซต์ iRobotCAM: www.iRobotCAM.com


