บทคัดย่อ: โดยมุ่งเน้นไปที่สถานการณ์การใช้งานของการทำงานอัตโนมัติของหน่วยวัสดุของหุ่นยนต์ iRobotCAM ซึ่งเป็นซอฟต์แวร์การเขียนโปรแกรมออฟไลน์สำหรับหุ่นยนต์ในประเทศที่พัฒนาโดย YueQing Technology มอบโมดูลการออกแบบหน่วยวัสดุที่สะดวก ซึ่งสามารถสร้างการสื่อสารกับ PLC ได้อย่างรวดเร็วและทำให้เกิดการทำงานอัตโนมัติตามความต้องการของหน่วยวัสดุ
เพื่อเป็นพื้นฐานสำหรับการออกแบบและการจำลองการดีบักของสายการผลิตหุ่นยนต์ หน่วยการผลิตวัสดุได้กำหนดวิธีการออกแบบสำหรับส่วนประกอบต่างๆ ที่แตกต่างกันในวิธีที่สะดวก เมื่อกลับไปที่แหล่งที่มา จากมุมมองของการไหลของวัสดุโดยรวม กระบวนการของสถานการณ์วัสดุพื้นฐานส่วนใหญ่จะคล้ายกับโหมดต่อไปนี้:
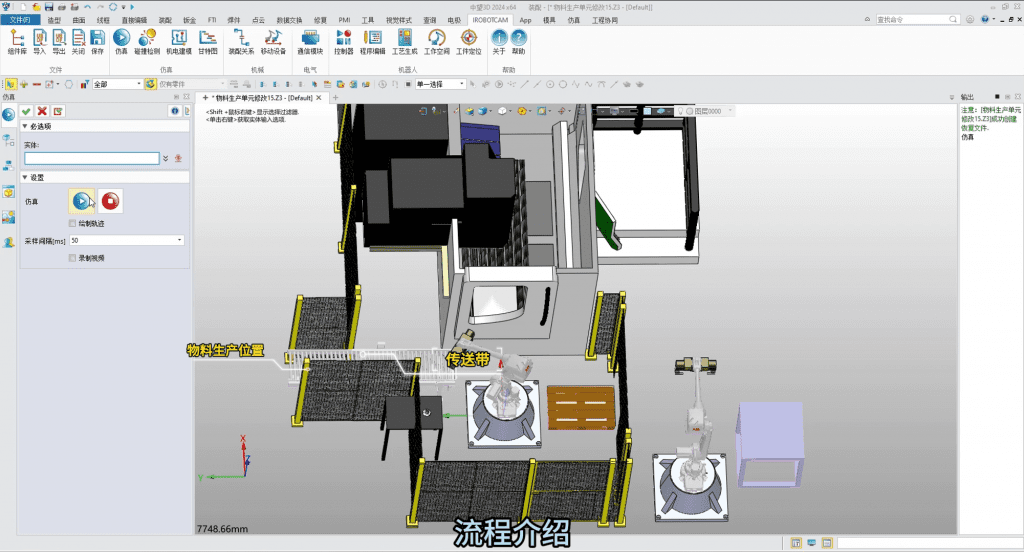
- ในฉากนั้น ทางเข้าสายพานลำเลียงจะผลิตวัสดุ ขนส่งวัสดุไปยังจุดสิ้นสุด ตรวจจับวัสดุที่จุดสิ้นสุด และสายพานลำเลียงจะหยุดทำงาน
- หุ่นยนต์ในพื้นที่การโหลดจะรับสัญญาณเพื่อยึดวัสดุเข้ากับเครื่องมือเครื่องจักรเพื่อการประมวลผลและการโหลด และสุดท้ายจะวางบนแผ่นสายพานลำเลียงเพื่อการขนส่ง
- หุ่นยนต์ในพื้นที่ขนถ่ายรอให้แผ่นสายพานลำเลียงขนส่งวัสดุออกไป และหลังจากได้รับสัญญาณแล้ว ก็จะยึดวัสดุไว้บนโต๊ะวางวัสดุ
- ทางเข้าสายพานลำเลียงดำเนินการผลิตวัสดุต่อไป และหุ่นยนต์จะเข้าสู่วงจรการโหลดและการขนถ่าย
การออกแบบฟังก์ชันนั้นสะดวกสบายมาก หน่วยวัสดุสามารถสร้างวัสดุสำหรับสายการผลิตที่หลากหลายได้โดยอัตโนมัติ หน้าต่างฟังก์ชันของหน่วยการผลิตวัสดุนั้นสร้างขึ้นโดยรวมวัตถุการผลิต สถานที่ผลิต และความถี่ในการผลิตเข้าด้วยกัน
ความสามารถในการขยายฟังก์ชันนั้นน่าทึ่งมาก โดยได้รับการปรับแต่งให้เหมาะกับความต้องการของหน่วยวัสดุโดยเฉพาะ เอ็นจิ้นกายภาพอันทรงพลังของ iRobotCAM สามารถตอบสนองความต้องการของการจำลองการเคลื่อนไหวของหุ่นยนต์หลายตัวได้แม้ในสถานการณ์ที่ซับซ้อนมากขึ้น
ยกตัวอย่างการใช้งานการโหลดและขนถ่ายหุ่นยนต์ iRobotCAM สามารถนำการออกแบบต่อไปนี้ไปใช้ได้ทันที:
ขั้นแรก นำโมเดลหุ่นยนต์เข้าสู่ฉากจากไลบรารีส่วนประกอบและประกอบเข้ากับหุ่นยนต์โดยตั้งค่าเครื่องมือหุ่นยนต์แยกกัน
ประการที่สอง ซอฟต์แวร์ช่วยให้สามารถเพิ่มเครื่องหมายผ่านการสอนแบบลากและวาง พร้อมกับเพิ่มคำสั่งโปรแกรมหุ่นยนต์ จึงควบคุมโปรแกรมหุ่นยนต์เพื่อดำเนินการโหลดและขนถ่ายฟังก์ชัน
ในที่สุด สามารถเพิ่มหุ่นยนต์หลายตัวลงในฉากได้ และคำสั่งโปรแกรมหุ่นยนต์จะได้รับการจัดการโดยตัวควบคุมหุ่นยนต์หลายตัวเพื่อดำเนินการโหลดและขนถ่ายฟังก์ชันพื้นที่ตามลำดับ
ในฐานะหน่วยการผลิตวัสดุ เราจะศึกษาเพิ่มเติมว่า iRobotCAM สามารถทำให้หน่วยวัสดุของหุ่นยนต์ทำงานอัตโนมัติได้อย่างสะดวกผ่านวิดีโอต่อไปนี้ได้อย่างไร
เกี่ยวกับ Yueqing Technology
Yueqing Technology มุ่งมั่นที่จะสร้างแพลตฟอร์มการเขียนโปรแกรมออฟไลน์สำหรับหุ่นยนต์ iRobotCAM แบบเปิด ซึ่งเป็นโซลูชันดิจิทัลที่ผสานการออกแบบแนวความคิดด้านไฟฟ้ากลของสายการผลิต การจำลองการเขียนโปรแกรมการประมวลผลหุ่นยนต์ และการแก้จุดบกพร่องแบบเสมือน
เว็บไซต์ iRobotCAM: www.iRobotCAM.com


