บทคัดย่อ: เมื่อเผชิญกับปัญหาของเกณฑ์มาตรฐานที่สูงและต้นทุนที่สูงของการสร้างแบบจำลองหุ่นยนต์และแพลตฟอร์มการฝึกอบรม Yueqing Technology จึงใช้ประโยชน์จากข้อได้เปรียบด้านเทคโนโลยีอุตสาหกรรมของตนเองในซอฟต์แวร์หุ่นยนต์เพื่อเปิดตัวโมดูลการสร้างแบบจำลองหุ่นยนต์ที่ใช้เคอร์เนลเรขาคณิต 3 มิติ ขยายอินเทอร์เฟซ URDF และเปิดให้มีการจำลองและวิเคราะห์หุ่นยนต์ ROS
เมื่อเผชิญกับปัญหาเรื่องเกณฑ์มาตรฐานที่สูงและต้นทุนที่สูงของการสร้างแบบจำลองหุ่นยนต์และแพลตฟอร์มการฝึกอบรม Yueqing Technology ได้ใช้ประโยชน์จากข้อได้เปรียบทางเทคนิคของอุตสาหกรรมในด้านซอฟต์แวร์หุ่นยนต์เพื่อเปิดตัวโมดูลการสร้างแบบจำลองหุ่นยนต์ iRobotCAM ที่ใช้แพลตฟอร์มเคอร์เนลเรขาคณิตสามมิติ
- ด้วยความสามารถในการสร้างแบบจำลองของ iRobotCAM และความสามารถของเครื่องยนต์ฟิสิกส์ที่พัฒนาขึ้นเอง iRobotCAM สามารถสร้างและจัดการแบบจำลองหุ่นยนต์และการจำลองพฤติกรรมทางกายภาพได้อย่างรวดเร็ว
- ด้วยอินเทอร์เฟซการนำเข้าและส่งออก URDF ที่ขยายเพิ่ม โปรแกรมเสริม iRobotCAM เชื่อมต่อกับหุ่นยนต์ ROS ช่วยให้ผู้ใช้สามารถเชื่อมต่อการสร้างแบบจำลองหุ่นยนต์และการจำลองหุ่นยนต์เพื่อฝึกแบบจำลองทางกายภาพของหุ่นยนต์ได้อย่างมีประสิทธิภาพมากขึ้น
ต่อไปนี้เป็นตัวอย่างหุ่นยนต์อุตสาหกรรมที่ง่ายที่สุดเพื่ออธิบายเพิ่มเติมเกี่ยวกับการใช้ iRobotCAM ในการสร้างแบบจำลองหุ่นยนต์และการฝึกอบรม:
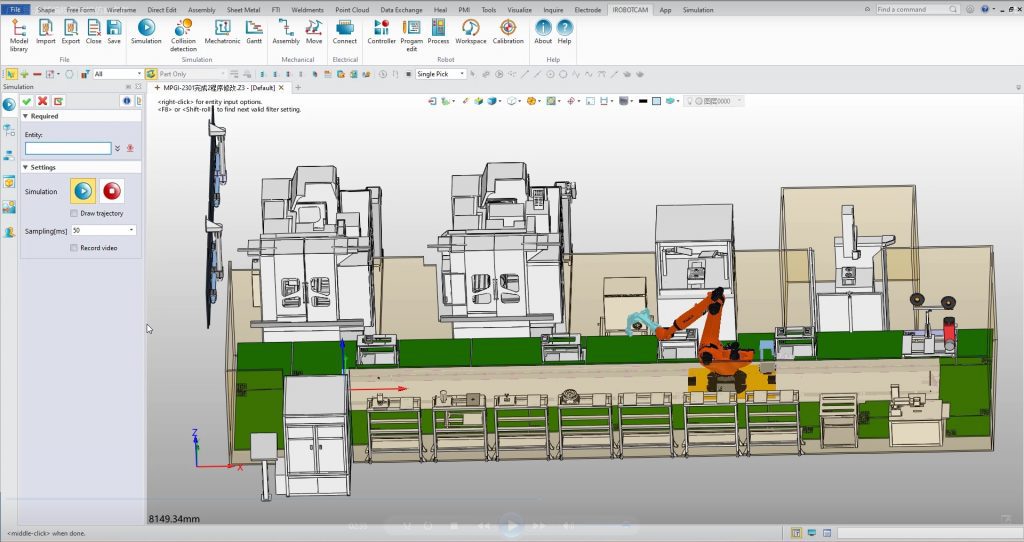
- การสร้างแบบจำลองฉาก 3 มิติแบบดิจิทัล
- ด้วยการใช้ฟังก์ชันการสร้างแบบจำลอง 3 มิติ iRobotCAM สามารถสร้างแบบจำลอง 3 มิติที่ซับซ้อนและสร้างแบบจำลองฉากดิจิทัลที่สมบูรณ์ได้
- รองรับการนำเข้า iges, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid และรูปแบบ 3D อื่นๆ เพื่อนำโมเดล 3D ที่มีอยู่มาใช้ซ้ำ และปรับปรุงประสิทธิภาพในการสร้างฉากดิจิทัลของหุ่นยนต์
- ห้องสมุดการออกแบบเมคคาทรอนิกส์และหุ่นยนต์
- การจัดตั้งสภาพแวดล้อมข้อมูลเซ็นเซอร์: รองรับระบบสัญญาณ PLC รวมถึง Siemens, Mitsubishi, Inovance และแบรนด์อื่น ๆ และรองรับการปรับแต่งอุปกรณ์เข้าถึงสัญญาณเพิ่มเติม
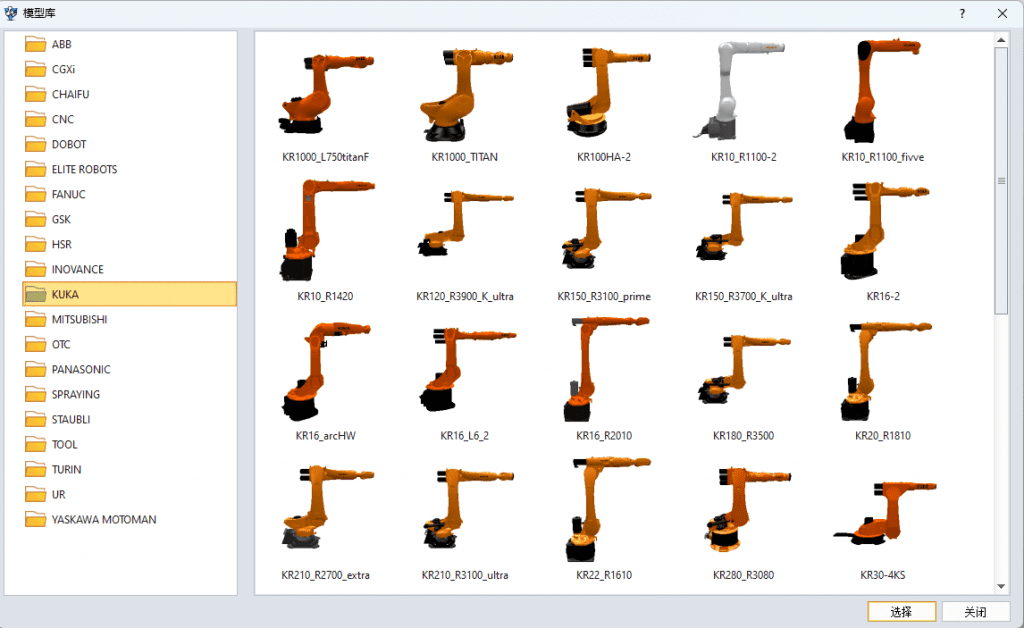
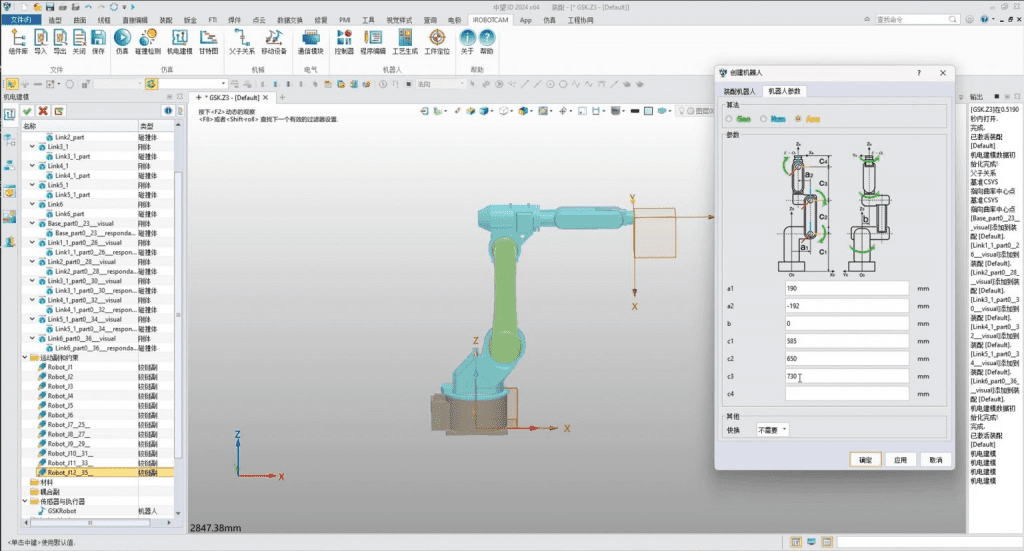
- การจัดตั้งห้องสมุดหุ่นยนต์: สำหรับหุ่นยนต์ในอุตสาหกรรม คุณสามารถใช้ห้องสมุดหุ่นยนต์ในตัว ได้แก่ ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO และ Turing เพื่อสร้างแบบจำลองจำลองหุ่นยนต์ หรือจัดตั้งห้องสมุดหุ่นยนต์ของคุณเองผ่านฟังก์ชันการปรับแต่งหุ่นยนต์ สำหรับหุ่นยนต์มนุษย์หรือหุ่นยนต์เหล็ก ข้อมูลข้อต่อโดยละเอียดของชิ้นส่วนที่เกี่ยวข้องสามารถกำหนดได้ตามต้องการ และสามารถกำหนดคำจำกัดความของข้อต่อโดยรวม การตรวจจับการชน ฯลฯ เพื่อสร้างไลบรารีหุ่นยนต์มนุษย์หรือหุ่นยนต์มีล้อเฉพาะได้
- การฝึกหุ่นยนต์
- การสร้างแบบจำลองการวางแผนวิถีการเคลื่อนที่ของหุ่นยนต์: รองรับการจำลองการสื่อสาร IO หลายเครื่องจักร การซิงโครไนซ์หุ่นยนต์หลายตัว และการวางแผนการเชื่อมโยงหุ่นยนต์หลายแกน
- การฝึกอบรมแบบจำลองทางกายภาพที่ฝึกโดยหุ่นยนต์: รองรับการจำลองลักษณะทางกายภาพโดยใช้กลไกฟิสิกส์ของตัวเอง รวมไปถึงข้อกำหนดการหลีกเลี่ยงสิ่งกีดขวาง การวิเคราะห์การชน และแบบจำลองข้อมูลอื่น ๆ และรองรับการขยายอินเทอร์เฟซของบุคคลที่สามเพื่อรองรับอัลกอริทึมการฝึกอบรมของหุ่นยนต์ในสถานการณ์เฉพาะ
- การเชื่อมต่อข้อมูลกับหุ่นยนต์ ROS เพื่อแก้ไขปัญหาร่วมกัน
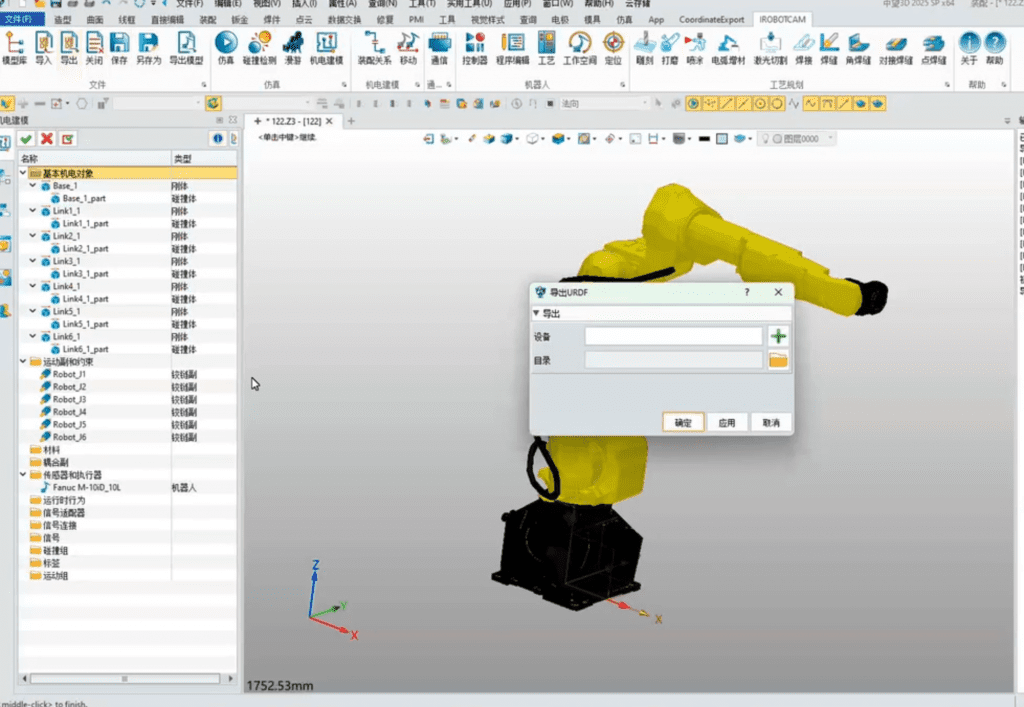
- สามารถส่งออกแบบจำลองการปรับปรุงหุ่นยนต์ที่สร้างโดย iRobotCAM ไปยัง URDF เพื่อจำลองและดำเนินการหุ่นยนต์ ROS เพิ่มเติมได้
- ด้วยฟังก์ชันนำเข้า URDF จึงสามารถนำแบบจำลองฐานหุ่นยนต์เข้าสู่ iRobotCAM ได้ และสามารถปรับเปลี่ยนและฝึกอบรมสภาพแวดล้อมข้อมูลหุ่นยนต์ใน iRobotCAM เพื่อให้บรรลุเป้าหมายการออกแบบของแบบจำลองข้อมูลหุ่นยนต์ได้
เกี่ยวกับ Yueqing Technology
Yueqing Technology มุ่งมั่นที่จะสร้างแพลตฟอร์มการเขียนโปรแกรมออฟไลน์สำหรับหุ่นยนต์ iRobotCAM แบบเปิด ซึ่งเป็นโซลูชันดิจิทัลที่ผสานการออกแบบแนวความคิดด้านไฟฟ้ากลของสายการผลิต การจำลองการเขียนโปรแกรมการประมวลผลหุ่นยนต์ และการแก้จุดบกพร่องแบบเสมือน
เว็บไซต์ iRobotCAM: www.iRobotCAM.com;


