Robot production line design/offline programming/virtual commissioning
Reliable physics simulation engine
Virtual debugging and joint commissioning of workstations
Open process integration architecture
Quickly integrate customized process modules such as welding and spraying.
Robot Design and Simulation
Supports importing dozens of data formats including Solidworks, NX, Catia, Creo, Inventor, STEP, Parasolid, etc.;
Supports robot joint definition, signal control, etc.,
Supports URDF import or export, supports the export of joint, inertia and other parameters, and facilitates the use of robot systems such as ROS systems or simulation training software;
iRobotCAM has a complete dynamics engine to ensure that the output URDF meets the simulation requirements of software such as ROS.
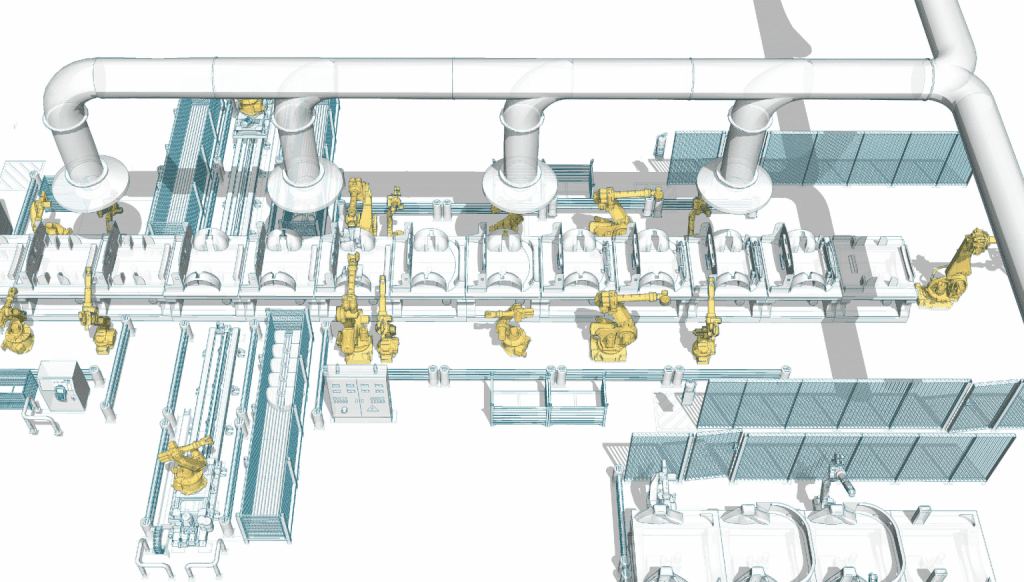
Robot production line design
Use parametric design software to meet the design of single robot workstations and robot production lines.
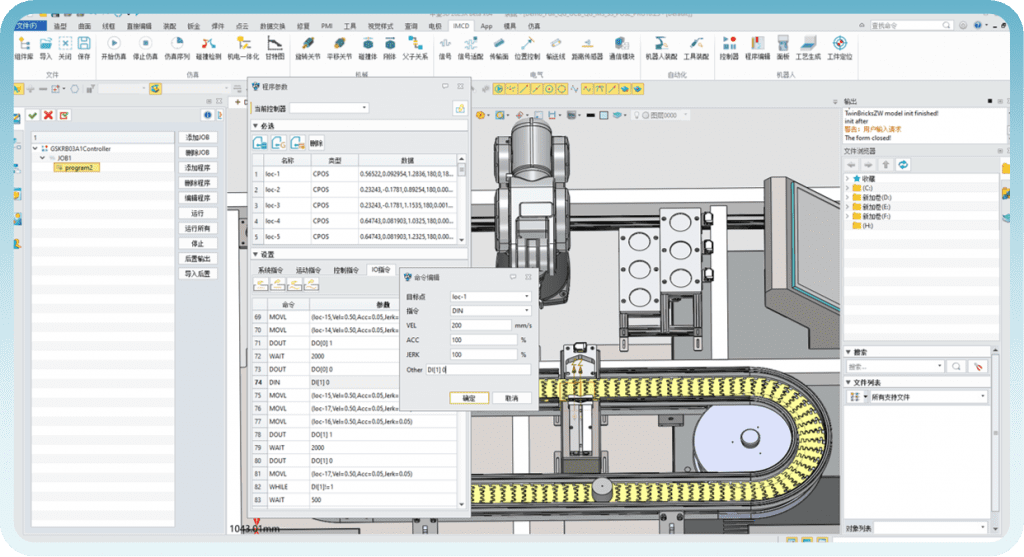
Robot offline programming
Office Programming Process: Robot model import–>Process planning–>Machining process simulation–>Workstation system optimization–>Post code output
Programming verification: Support robot program decompilation, which can verify and optimize robot programs
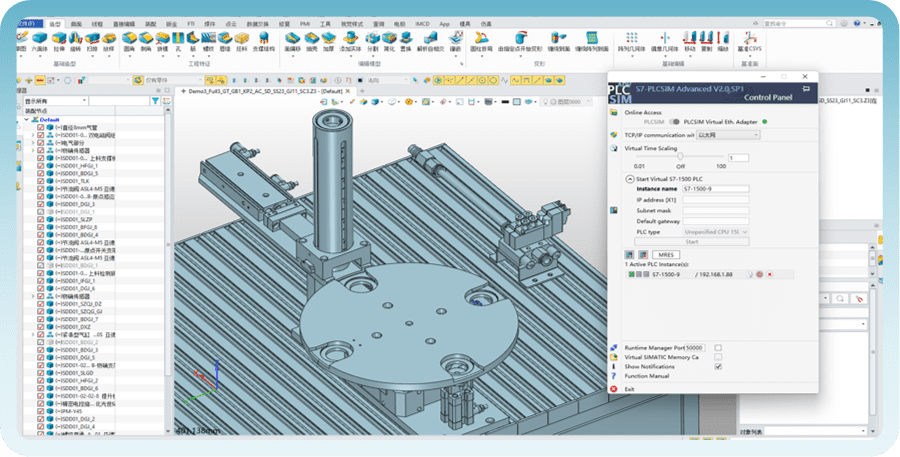
Robot virtual commissioning
Equipped with virtual commissioning and virtual monitoring, the actions of the virtual robot system workstation and the actual robot system workstation can be synchronized;
Supports multi-machine IO communication simulation, multi-robot synchronization, and multi-axis linkage planning of robots.
iRobotCAM
Dedicated in offline programming, virtual commissioning, robot design and simulation