Zusammenfassung: Angesichts des Problems der hohen Schwelle und der hohen Kosten der Robotermodellierungs- und Trainingsplattform nutzt Yueqing Technology seine eigenen Branchentechnologievorteile bei Robotersoftware, um das auf dem 3D-Geometriekernel basierende Robotermodellierungsmodul freizugeben, die URDF-Schnittstelle zu erweitern und die Simulation und Analyse von ROS-Robotern zu ermöglichen.
Angesichts des Problems der hohen Hürden und Kosten einer Robotermodellierungs- und Trainingsplattform nutzte Yueqing Technology seine technischen Branchenvorteile im Bereich Robotersoftware, um das Robotermodellierungsmodul iRobotCAM auf Basis der 3D-Geometrie-Kernelplattform herauszubringen.
- Mit den Modellierungsfunktionen von iRobotCAM und den Funktionen der selbst entwickelten Physik-Engine kann iRobotCAM schnell Robotermodelle erstellen und verwalten sowie physikalische Simulationen durchführen.
- Mit den erweiterten URDF-Import- und -Exportschnittstellen verbindet sich iRobotCAM weiter mit ROS-Robotern, sodass Benutzer Robotermodellierung und Robotersimulation verbinden können, um das physikalische Modell von Robotern effektiver zu trainieren.
Im Folgenden wird anhand des einfachsten Industrieroboters näher erläutert, wie mit iRobotCAM Robotermodellierung und Trainingsmodelle realisiert werden können:
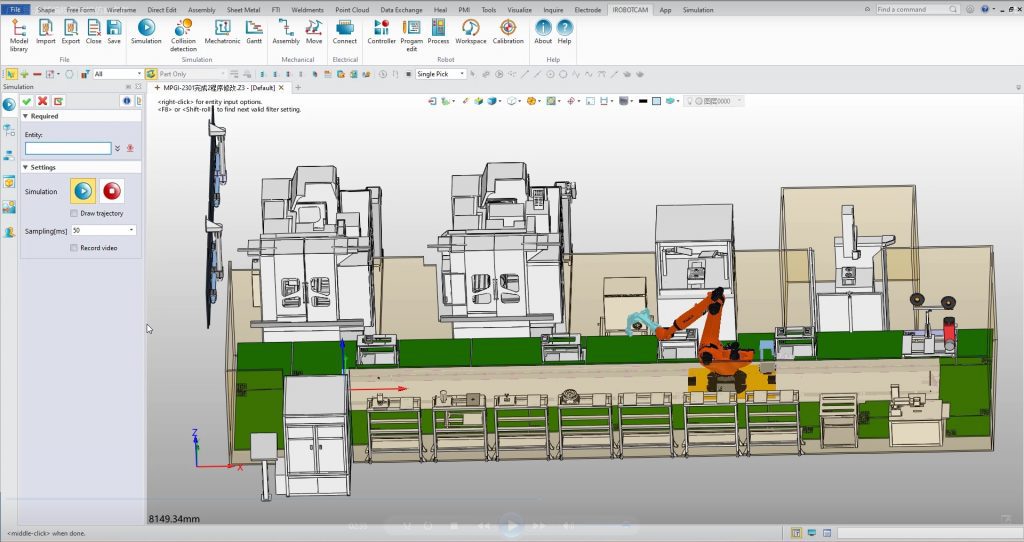
- Digitale 3D-Szenenmodellierung
- Mithilfe der 3D-Modellierungsfunktion kann iRobotCAM komplexe 3D-Modelle erstellen und die Modellierung digitaler Szenen abschließen.
- Unterstützt den Import von IGES, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid und anderen 3D-Formaten, um die vorhandenen 3D-Modelle wiederzuverwenden und die Effizienz der digitalen Roboterszenenkonstruktion zu verbessern.
- Bibliothek für Mechatronikdesign und Robotik
- Aufbau einer Sensordatenumgebung: Unterstützung von SPS-Signalsystemen, einschließlich Siemens, Mitsubishi, Inovance und anderen Marken, und Unterstützung der Anpassung weiterer Signalzugriffsgeräte
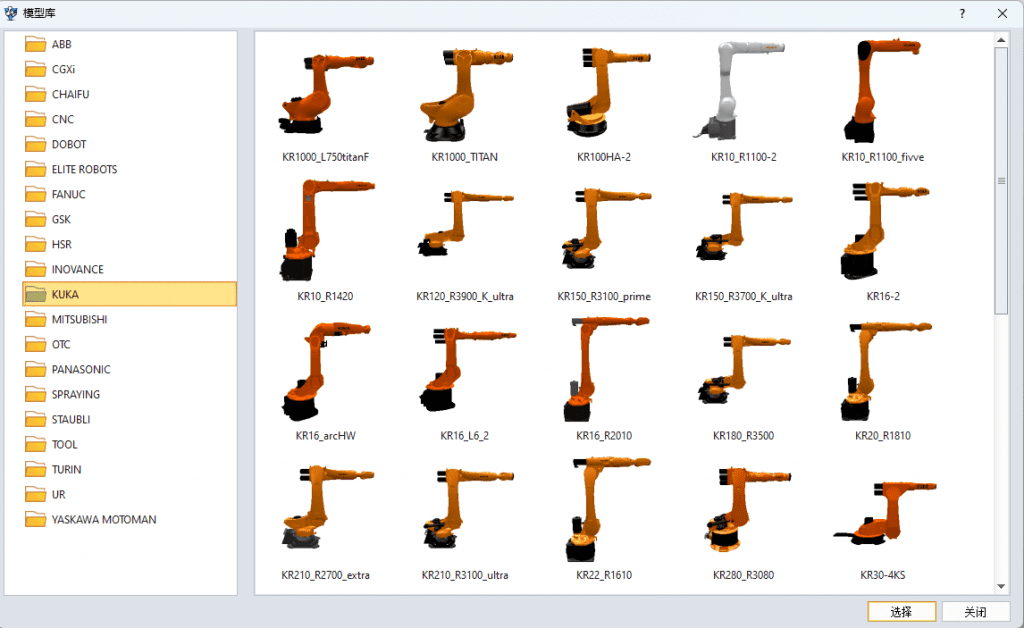
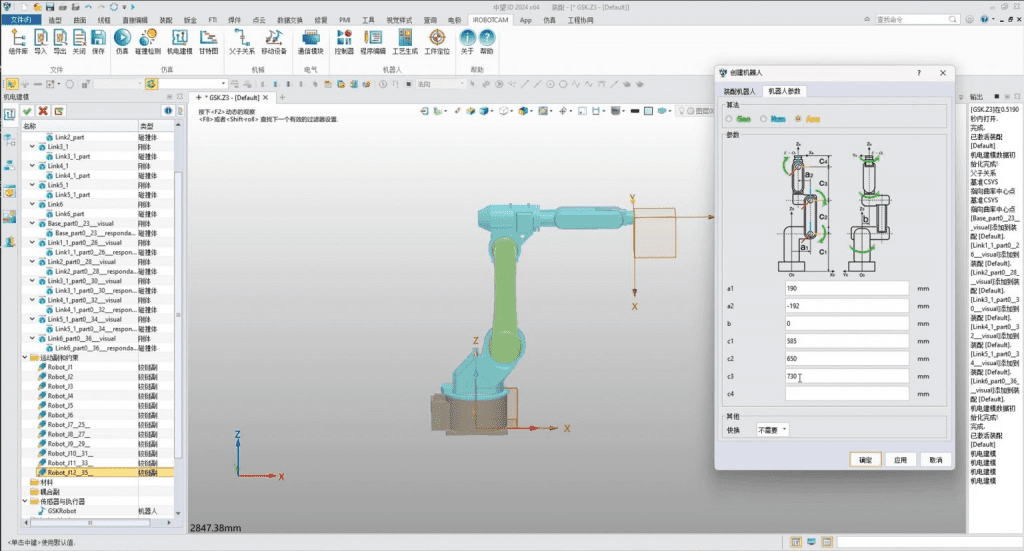
- Erstellen einer Roboterbibliothek: Für Industrieroboter können Sie die eingebetteten Roboterbibliotheken von ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO und Turing nutzen, um Robotersimulationsmodelle zu erstellen, oder mithilfe von Roboteranpassungsfunktionen Ihre eigene Roboterbibliothek erstellen. Für humanoide oder Radroboter können die detaillierten Gelenkinformationen der entsprechenden Teile nach Bedarf erstellt und die Gesamtgelenkdefinition, Kollisionserkennung usw. zu einer vollständigen humanoiden oder Radroboterbibliothek zusammengefasst werden.
- Robotertraining
- Erstellung eines Roboter-Trajektorienplanungsmodells: unterstützt die Simulation der E/A-Kommunikation mehrerer Maschinen, die Synchronisierung mehrerer Roboter und die Planung der Mehrachsen-Roboterverbindung;
- Training von durch Roboter trainierten physikalischen Modellen: Es unterstützt die Simulation physikalischer Eigenschaften durch die Verwendung einer eigenen Physik-Engine, einschließlich Anforderungen zur Hindernisvermeidung, Kollisionsanalyse und anderer Datenmodelle, und unterstützt die Erweiterung von Schnittstellen von Drittanbietern, um die Trainingsalgorithmen von Robotern in bestimmten Szenarien zu unterstützen.
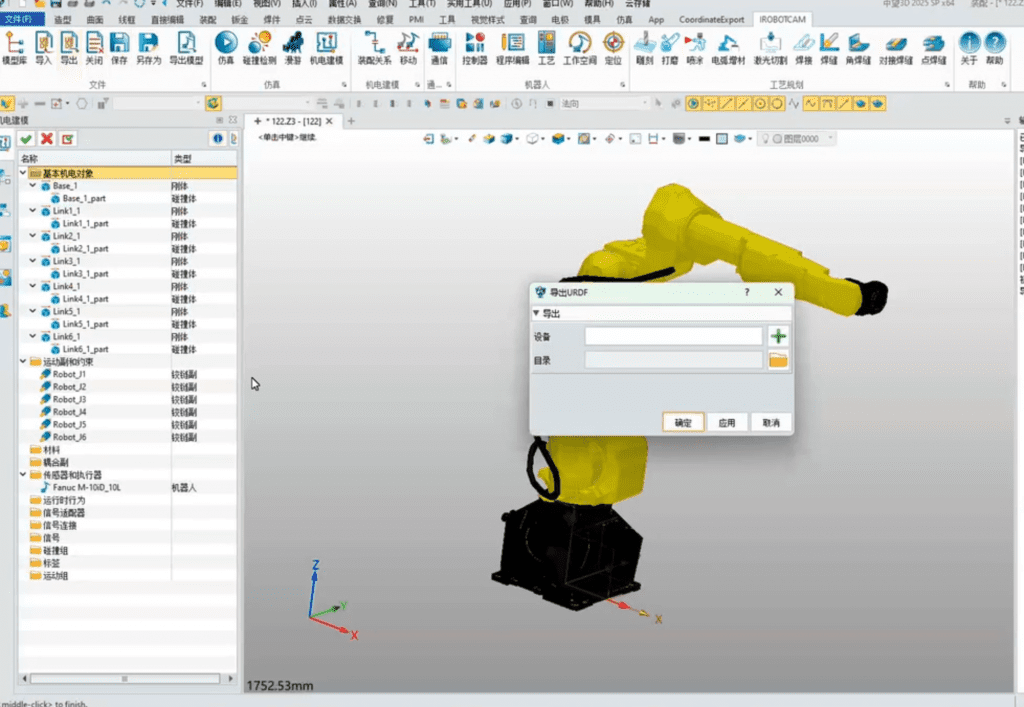
- Datenandocken mit ROS-Robotern zur Erzielung eines gemeinsamen Debuggings
- Das von iRobotCAM erstellte Roboteroptimierungsmodell kann zur weiteren Simulation und Ausführung von ROS-Robotern in URDF exportiert werden
- Mit der Importfunktion von URDF kann das Roboter-Basismodell in iRobotCAM importiert werden und die Roboterdatenumgebung kann auf iRobotCAM weiter geändert und trainiert werden, um die Designziele des Roboterdatenmodells zu erreichen.
Über Yueqing Technology
Yueqing Technology hat sich zum Ziel gesetzt, eine offene Offline-Programmierplattform für iRobotCAM-Roboter zu entwickeln. Dabei handelt es sich um eine digitale Lösung, die die elektromechanische Konzeption von Produktionslinien, die Simulation der Roboterverarbeitungsprogrammierung und virtuelles Debugging integriert.
iRobotCAM-Website: www.iRobotCAM.com; Kontakt: cooperation@iRobotCAM.com


