Conception de robots/conception de lignes de production/programmation hors ligne/mise en service virtuelle
Moteur de simulation physique fiable
Mise en service virtuelle avec plusieurs postes de travail
Architecture d'intégration de processus ouverte
Intégrez rapidement des modules de processus personnalisés
Conception et simulation de robots
Prend en charge l’importation de dizaines de formats de données, notamment Solidworks, NX, Catia, Creo, Inventor, STEP, Parasolid, etc.
Prend en charge la définition des articulations du robot, le contrôle du signal, etc.
Prend en charge l’importation ou l’exportation URDF, prend en charge l’exportation des paramètres d’articulation, d’inertie et autres, et facilite l’utilisation de systèmes robotiques tels que les systèmes ROS ou les logiciels de formation par simulation ;
iRobotCAM dispose d’un moteur dynamique complet pour garantir que la sortie URDF répond aux exigences de simulation de logiciels tels que ROS.
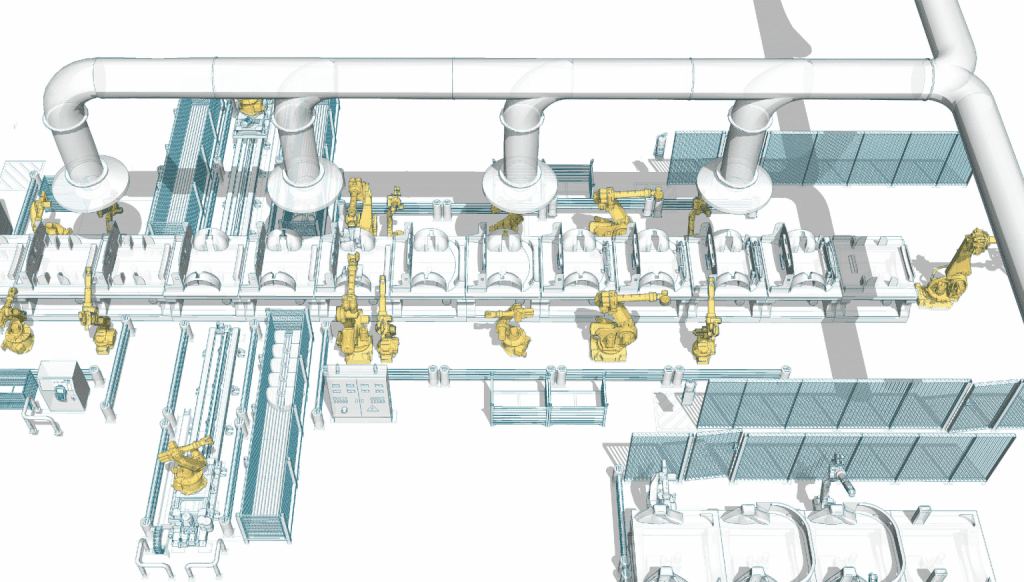
Conception d'une ligne de production robotisée
Utilisez un logiciel de conception paramétrique pour répondre à la conception de postes de travail à robot unique et de lignes de production de robots.
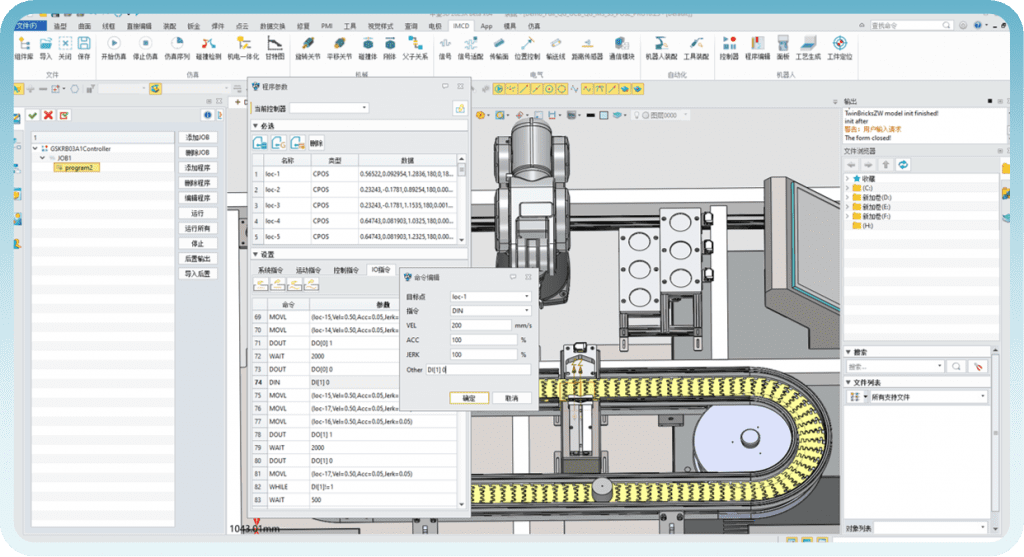
Programmation hors ligne du robot
Processus de programmation de bureau : Importation de modèles de robots –> Planification de processus –> Simulation de processus d’usinage –> Optimisation du système de poste de travail –> Sortie du code postal
Vérification de la programmation : Prise en charge de la décompilation des programmes de robot, qui peut vérifier et optimiser les programmes de robot
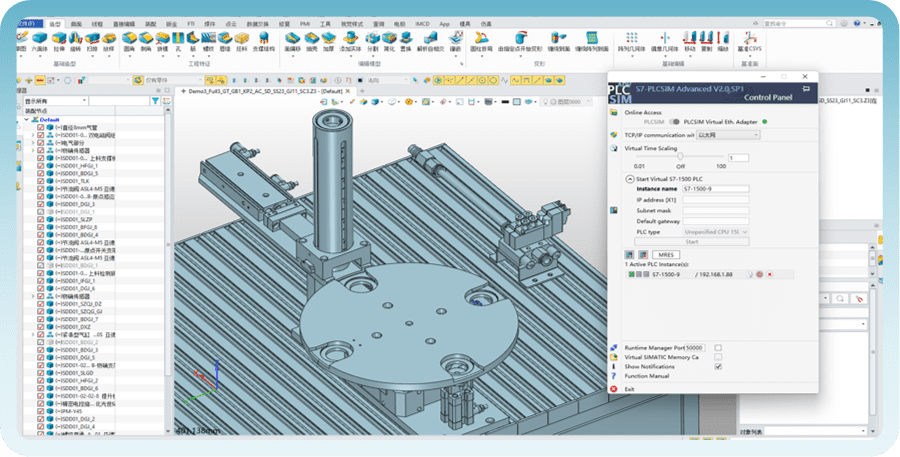
Mise en service virtuelle du robot
Équipé d’un débogage virtuel et d’une surveillance virtuelle, les actions du poste de travail du système robotique virtuel et du poste de travail du système robotique réel peuvent être synchronisées ;
Prend en charge la simulation de communication IO multi-machines, la synchronisation multi-robots et la planification de liaison multi-axes des robots.
En savoir plus sur les solutions d'usinage robotisé iRobotCAM