Tóm tắt: Khó khăn của quá trình gia công phủ laser bằng robot đối với các phôi phức tạp như lưỡi dao nằm ở việc sử dụng các đặc tính có độ chính xác cao và các ưu điểm về kiến trúc kỹ thuật của iRobotCAM dựa trên hạt nhân CAD 3D có thể đáp ứng hiệu quả các yêu cầu về độ chính xác cao, để hiện thực hóa quá trình gia công phủ laser có độ chính xác cao của lưỡi dao năm trục.
Thiết kế và gia công cánh quạt cần phải được điều chỉnh theo các tình huống cụ thể theo các tình huống ứng dụng khác nhau, từ cánh quạt nhỏ đến cánh quạt hàng không, theo các tình huống ứng dụng khác nhau của sản phẩm công nghiệp, các yếu tố thiết kế cũng khác nhau, một số yêu cầu hướng đến vẻ đẹp, một số yêu cầu dựa trên sự im lặng, một số yêu cầu dựa trên hiệu suất và việc cánh quạt cuối cùng có đáp ứng được nhu cầu hay không liên quan đến nhu cầu của các ngành công nghiệp khác nhau, cũng như yêu cầu của các phương pháp xử lý khác nhau, cốt lõi là kiểm soát độ chính xác, chỉ có độ chính xác mới được kiểm soát hiệu quả, Có một cách để đáp ứng nhu cầu của các tình huống khác nhau. Lấy ví dụ về quá trình gia công phủ laser bằng robot cho cánh quạt, iRobotCAM tận dụng kiến trúc dựa trên CAD và có ưu điểm là kiến trúc có độ chính xác cao, làm thế nào để áp dụng hiệu quả vào quá trình gia công phủ laser?
Đối với các ứng dụng xử lý laser bằng robot, quy trình thông thường như sau:
Nhập robot và phôi > định vị phôi và hiệu chuẩn robot > thực hiện lập trình quỹ đạo > mô phỏng tất cả các cảnh > đầu ra mã và xử lý robot
- Sử dụng các tính năng của iRobotCAM dựa trên nền tảng CAD 3D và xem 3D, bạn có thể nhanh chóng thiết lập mô hình kỹ thuật số của kịch bản ứng dụng robot
- Sử dụng mô-đun cơ điện của iRobotCAM và thư viện robot được cài đặt sẵn, bạn có thể xác định các robot, công cụ, v.v. có liên quan cho bối cảnh robot
- Theo nhu cầu của quy trình xử lý laser, nhiều quỹ đạo từ 2 trục đến 5 trục được tạo ra để đáp ứng các yêu cầu về quỹ đạo của các tình huống cụ thể
- Dựa trên công cụ vật lý của iRobotCAM, chuyển động của robot được mô phỏng, hiệu chỉnh và đưa ra mã thực thi tương ứng.
Ngoài kiến trúc kỹ thuật, nhận thức trực tiếp nhất của người dùng là mức độ dễ dàng khi lập trình phần mềm robot và trải nghiệm của người dùng là một trong những chỉ số cốt lõi. Nói một cách thẳng thắn, sự tiến bộ của phần mềm công nghiệp không phải là công việc của một ngày, nhưng từ kiến trúc kỹ thuật đến trải nghiệm người dùng, phần mềm công nghiệp trong nước đã có những tiến bộ lớn trong những năm gần đây, với nhiều năm như vậy của phần mềm nước ngoài, bạn cũng có thể thử phần mềm công nghiệp trong nước, để lựa chọn phần mềm lập trình robot ngoại tuyến, bạn cũng có thể thử iRobotCAM.
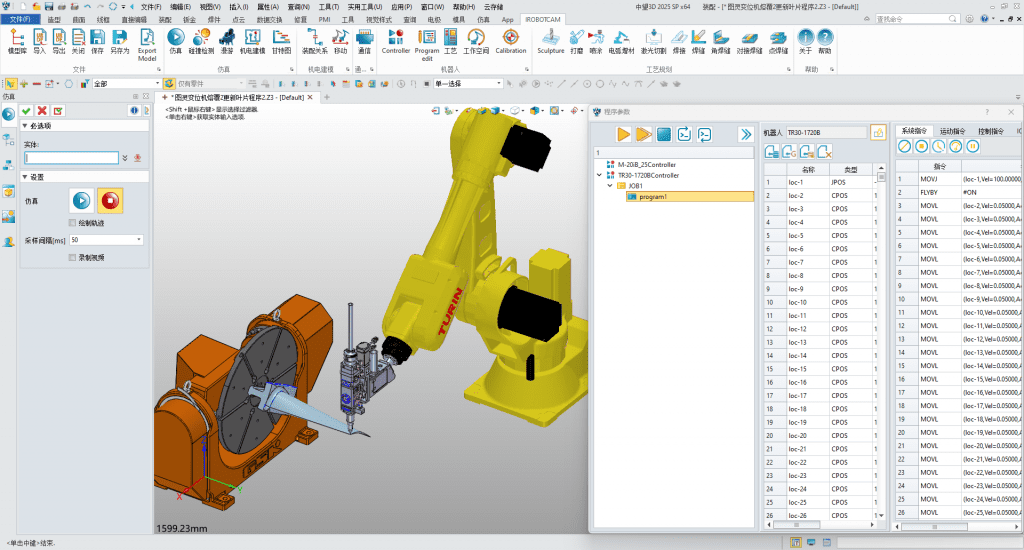
Lấy ví dụ về việc sử dụng robot Turin để thực hiện gia công cắt laser bằng lưỡi dao năm trục, iRobotCAM dễ dàng thực hiện gia công từng bước bằng robot laser như thế nào?
Giới thiệu về Công nghệ Yueqing
Yueqing Technology cam kết xây dựng nền tảng lập trình ngoại tuyến robot iRobotCAM mở, đây là giải pháp kỹ thuật số tích hợp thiết kế khái niệm cơ điện của dây chuyền sản xuất, mô phỏng lập trình xử lý robot và gỡ lỗi ảo.
Trang web iRobotCAM: www.iRobotCAM.com, liên hệ: cooperation@iRobotCAM.com


