Đối mặt với vấn đề ngưỡng cao và chi phí cao của nền tảng mô hình hóa và đào tạo robot, Yueqing Technology đã tận dụng lợi thế kỹ thuật trong ngành về phần mềm robot để phát hành mô-đun mô hình hóa robot iRobotCAM dựa trên nền tảng hạt nhân hình học 3D.
- Với khả năng tạo mô hình của iRobotCAM và khả năng của công cụ vật lý tự phát triển, iRobotCAM có thể nhanh chóng tạo và quản lý các mô hình robot và mô phỏng hành vi vật lý.
- Với giao diện nhập và xuất URDF mở rộng, tiện ích bổ sung iRobotCAM kết nối với robot ROS, cho phép người dùng kết nối mô hình hóa robot và mô phỏng robot để đào tạo mô hình vật lý robot hiệu quả hơn.
Sau đây lấy ví dụ về robot công nghiệp đơn giản nhất để giải thích rõ hơn về cách sử dụng iRobotCAM để thực hiện mô hình hóa và đào tạo robot:
- Mô hình cảnh 3D kỹ thuật số
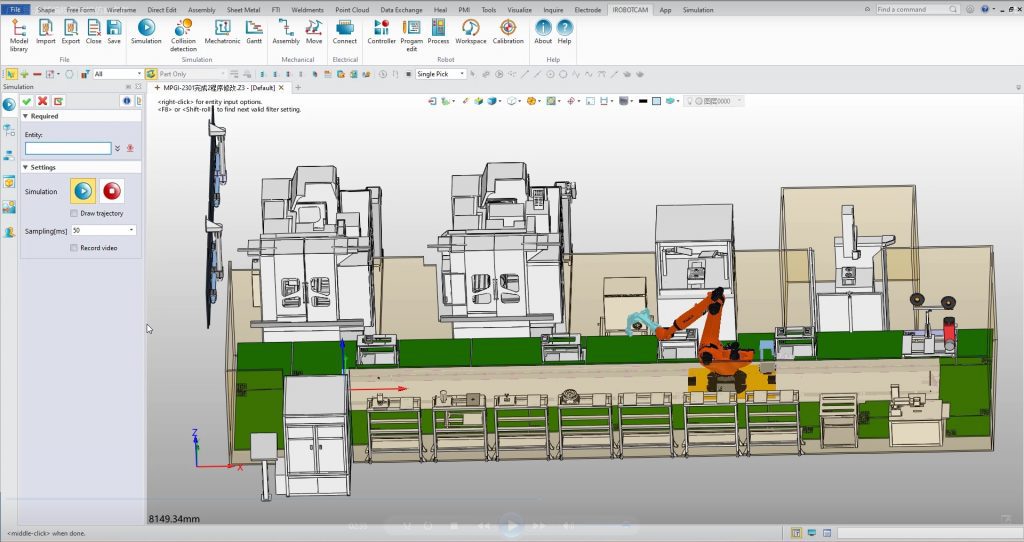
- Sử dụng chức năng tạo mô hình 3D, iRobotCAM có thể xây dựng các mô hình 3D phức tạp và hoàn thiện mô hình cảnh kỹ thuật số.
- Hỗ trợ nhập iges, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid và các định dạng 3D khác, nhằm tái sử dụng các mô hình 3D hiện có, nâng cao hiệu quả xây dựng cảnh kỹ thuật số của robot.
- Thư viện thiết kế cơ điện tử và robot
- Thiết lập môi trường dữ liệu cảm biến: hỗ trợ các hệ thống tín hiệu PLC bao gồm Siemens, Mitsubishi, Inovance và các thương hiệu khác, đồng thời hỗ trợ tùy chỉnh nhiều thiết bị truy cập tín hiệu hơn
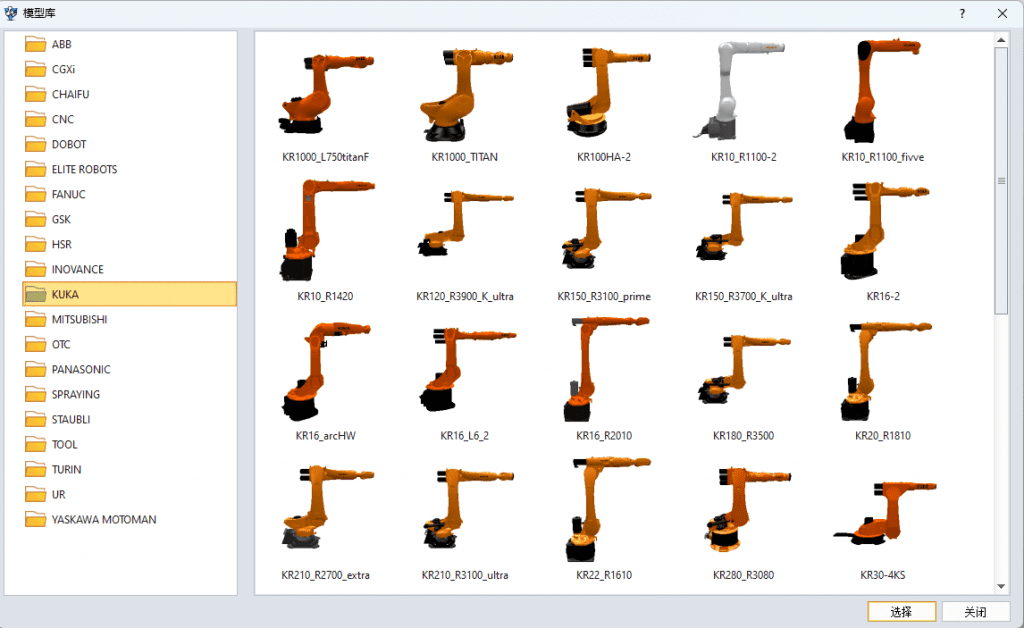
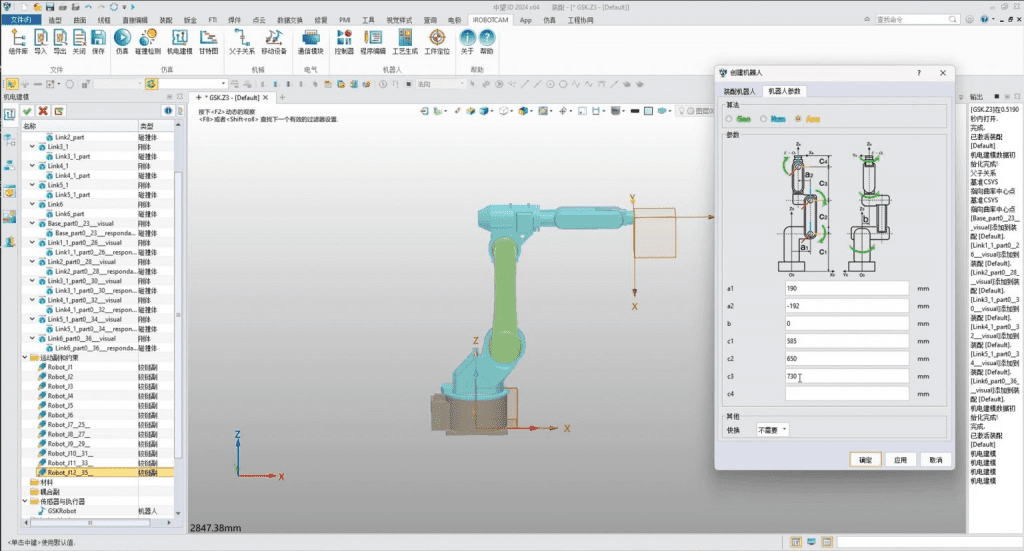
- Thiết lập thư viện robot: Đối với robot công nghiệp, bạn có thể sử dụng các thư viện robot tích hợp sẵn bao gồm ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO và Turing để thiết lập các mô hình mô phỏng robot hoặc thiết lập thư viện robot của riêng bạn thông qua các chức năng tùy chỉnh robot. Đối với robot người hoặc robot thép, thông tin chi tiết về khớp nối của các bộ phận tương ứng có thể được thiết lập khi cần và định nghĩa khớp nối tổng thể, phát hiện va chạm, v.v. có thể được hình thành để tạo thành thư viện robot hình người hoặc robot có bánh xe cụ thể.
- Đào tạo robot
- Thiết lập mô hình lập kế hoạch quỹ đạo robot: hỗ trợ mô phỏng giao tiếp IO đa máy, đồng bộ hóa đa robot và lập kế hoạch liên kết đa trục robot;
- Đào tạo các mô hình vật lý được đào tạo bởi robot: Hỗ trợ mô phỏng các đặc điểm vật lý bằng cách sử dụng công cụ vật lý riêng, bao gồm các yêu cầu tránh chướng ngại vật, phân tích va chạm và các mô hình dữ liệu khác, đồng thời hỗ trợ mở rộng giao diện của bên thứ ba để hỗ trợ các thuật toán đào tạo robot trong các tình huống cụ thể.
- Kết nối dữ liệu với robot ROS để đạt được khả năng gỡ lỗi chung
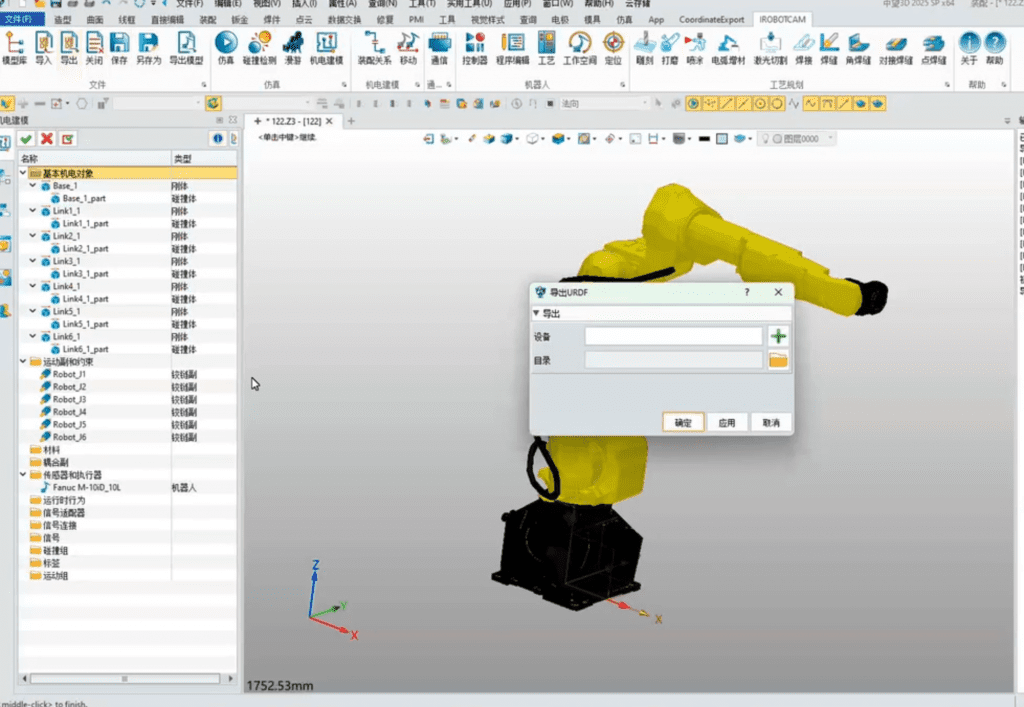
- Mô hình tối ưu hóa robot được hoàn thiện bởi iRobotCAM có thể được xuất sang URDF để mô phỏng và thực hiện thêm các robot ROS
- Với chức năng nhập URDF, mô hình cơ sở robot có thể được nhập vào iRobotCAM và môi trường dữ liệu robot có thể được sửa đổi và đào tạo trong iRobotCAM để đáp ứng các mục tiêu thiết kế của mô hình dữ liệu robot.
Giới thiệu về Công nghệ Yueqing
Yueqing Technology cam kết xây dựng nền tảng lập trình ngoại tuyến robot iRobotCAM mở, đây là giải pháp kỹ thuật số tích hợp thiết kế khái niệm cơ điện của dây chuyền sản xuất, mô phỏng lập trình xử lý robot và gỡ lỗi ảo.
Trang web iRobotCAM: www.iRobotCAM.com; Liên hệ: cooperation@iRobotCAM.com


