บทคัดย่อ: Wuhan Needs Intelligence ได้บรรลุความร่วมมือกับ Nanjing Yueqing Technology เพื่อสร้างต้นแบบฝาแฝดทางดิจิทัลของหุ่นยนต์ สาธิตความสัมพันธ์ระหว่างการสอนหุ่นยนต์กับการเขียนโปรแกรมแอปพลิเคชันหุ่นยนต์ และสาธิตสถานการณ์การใช้งานของหุ่นยนต์อย่างชัดเจน
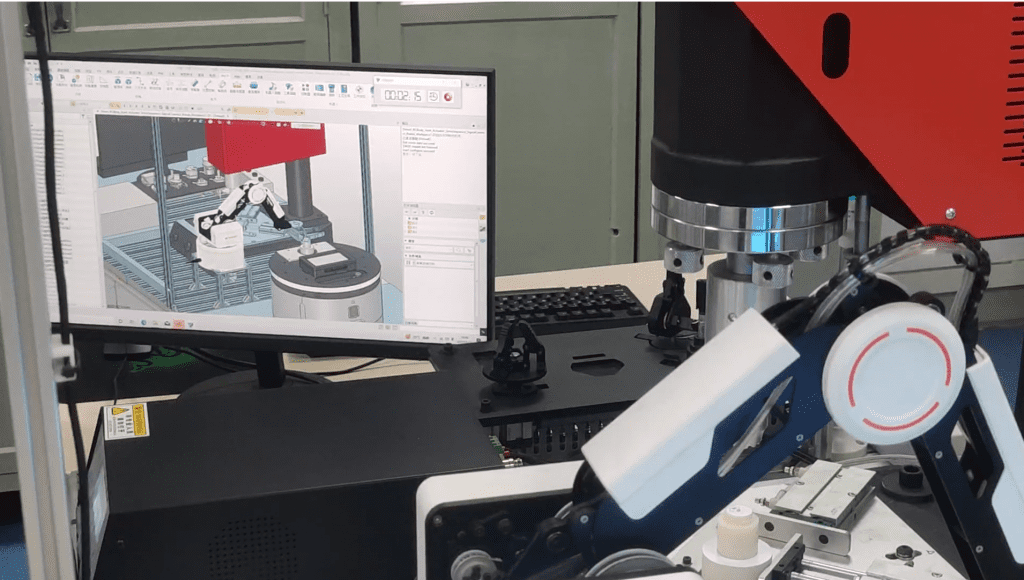
Wuhan Needs Intelligence ได้บรรลุความร่วมมือกับ Nanjing Yueqing Technology เพื่อสร้างฝาแฝดทางดิจิทัลของโลกกายภาพและโลกเสมือนจริงสำหรับสถานการณ์การใช้งานหุ่นยนต์ สร้างซอฟต์แวร์การเขียนโปรแกรมออฟไลน์ของหุ่นยนต์ iRobotCAM และการสื่อสาร PLC ของหุ่นยนต์ที่ต้องการความชาญฉลาด การควบคุมที่แม่นยำของการเคลื่อนไหวของข้อต่อ ฯลฯ โดยใช้แบบจำลองแอปพลิเคชันฝาแฝดแบบดิจิทัลแสดงให้เห็นถึงความสัมพันธ์ระหว่างการสอนหุ่นยนต์กับการเขียนโปรแกรมแอปพลิเคชันหุ่นยนต์ และแสดงสถานการณ์การใช้งานของหุ่นยนต์อย่างชัดเจน
สำหรับการประยุกต์ใช้ฝาแฝดทางดิจิทัล ปัจจุบันในอุตสาหกรรมมีสองเส้นทางทางเทคนิคที่แตกต่างกัน
เส้นทางเสมือนจริงที่มุ่งเน้นที่เอฟเฟกต์การจำลองโดยทั่วไปจะใช้เอ็นจิ้นเกมเช่น Unity เป็นเทคโนโลยีพื้นฐาน และพัฒนาต่อไปตามลักษณะเฉพาะของอุตสาหกรรมเพื่อปรับแต่งเอฟเฟกต์แอปพลิเคชันจำลองตามที่ต้องการ
อิงตามการสร้างแบบจำลองทางกายภาพ โดยการสร้างสะพานเชื่อมระหว่างโลกทางกายภาพและโลกเสมือนจริง ทำให้เกิดการโต้ตอบระหว่างความเป็นจริงและความเสมือนจริง และเกิดฝาแฝดทางดิจิทัลที่แท้จริง
ในแง่ของการประยุกต์ใช้เทคโนโลยี โลกคู่แฝดดิจิทัลที่สร้างขึ้นจากการสร้างแบบจำลองโลกทางกายภาพมักต้องมีการลงทุนด้านการวิจัยและพัฒนามากขึ้นเมื่อต้องเผชิญกับแบบจำลองนามธรรมที่แยกจากกันขององค์ประกอบสำคัญในโลกแห่งความเป็นจริงทางกายภาพ อย่างไรก็ตาม สำหรับการใช้งานในอุตสาหกรรม สถาปัตยกรรมคู่แฝดดิจิทัลที่แท้จริงนี้มีคุณค่าสูงกว่า โดยสามารถนำเสนอฉากทางกายภาพที่ซับซ้อนในโลกเสมือนจริงได้อย่างมีประสิทธิภาพ และยังสามารถขับเคลื่อนการเปลี่ยนแปลงในโลกทางกายภาพเพิ่มเติมผ่านการดีบักหุ่นยนต์เสมือนจริงเพิ่มเติม
สำหรับสาขาการใช้งานของหุ่นยนต์อุตสาหกรรม ในแง่ของการเลือกทางเทคนิคของซอฟต์แวร์การเขียนโปรแกรมออฟไลน์สำหรับหุ่นยนต์ iRobotCAM การเลือก iRobotCAM จะขึ้นอยู่กับข้อมูล CAD เพื่อให้เกิดการทำงานร่วมกันระหว่างโลกกายภาพและโลกเสมือนจริง และทำให้สามารถใช้งานแอปพลิเคชันฝาแฝดดิจิทัลที่แท้จริงได้ โดยเฉพาะอย่างยิ่ง ซอฟต์แวร์การเขียนโปรแกรมออฟไลน์สำหรับหุ่นยนต์อุตสาหกรรม iRobotCAM สร้างสภาพแวดล้อมการเขียนโปรแกรมเสมือนจริงที่สะดวกสบายของ iRobotCAM ได้อย่างไร
- การจำลองการประกอบมอเตอร์ รวมถึงหุ่นยนต์ อุปกรณ์เปลี่ยนด่วน สายพานลำเลียง และเซ็นเซอร์ต่างๆ
- การจำลองแบบซิงโครนัสแบบเสมือนจริงและแบบจริง รวบรวมข้อมูลสายการผลิต และจับคู่ข้อมูลตัวควบคุมการเคลื่อนที่และข้อมูล PLC กับระบบจำลอง
- รองรับการจำลองระบบต่างๆ รวมถึงสายพานลำเลียง หุ่นยนต์หลายตัว และระบบวัสดุ รองรับการจำลองระบบต่างๆ รวมถึงสายพานลำเลียง หุ่นยนต์หลายตัว และระบบวัสดุ
ด้วยการสร้างสถานการณ์การใช้งานอย่างรวดเร็วและเชื่อมต่อกับโมดูลการสื่อสารที่สอดคล้องกัน iRobotCAM จึงสามารถตระหนักถึงการแก้จุดบกพร่องเสมือนของหุ่นยนต์และสถานการณ์การใช้งานฝาแฝดแบบดิจิทัลได้
เกี่ยวกับ iRobotCAM :
เทคโนโลยี Yueqing มุ่งมั่นในการพัฒนาโซลูชั่นแบบครบวงจรสำหรับการออกแบบสายการผลิต การเขียนโปรแกรมหุ่นยนต์ออฟไลน์ และการดีบักเสมือน
เว็บไซต์ iRobotCAM:www.iRobotCAM.com,


