Wuhan Needs Intelligence hợp tác với Nanjing Yueqing Technology để hiện thực hóa nguyên mẫu robot song sinh kỹ thuật số
- bởi iRobotCAMReference
- 2023.7.25
Tóm tắt: Wuhan Needs Intelligence đã hợp tác với Nanjing Yueqing Technology để hiện thực hóa nguyên mẫu robot song sinh kỹ thuật số, chứng minh mối tương quan giữa robot dạy học và lập trình ứng dụng robot, đồng thời chứng minh trực quan các tình huống ứng dụng của robot.
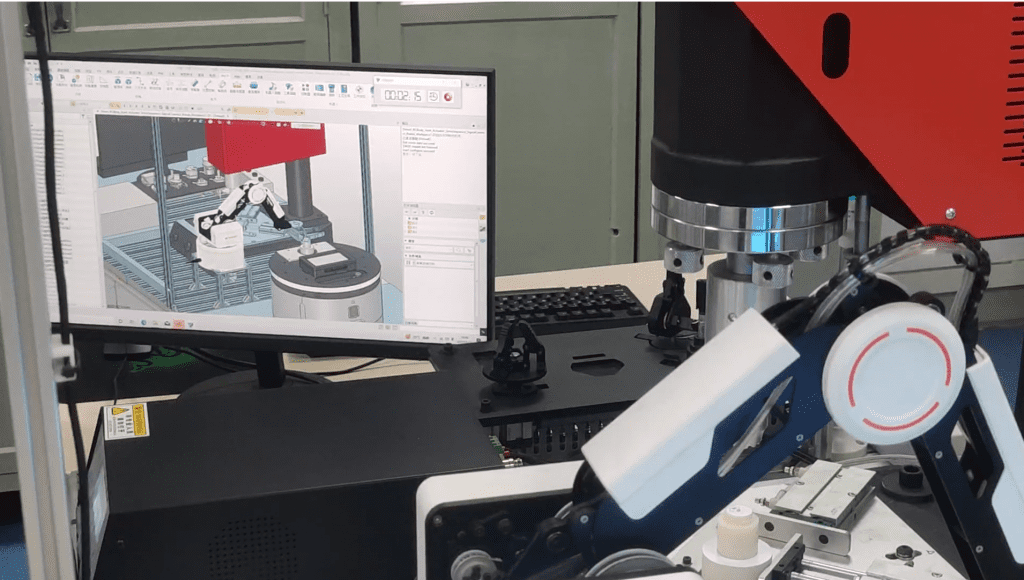
Wuhan Needs Intelligence đã hợp tác với Nanjing Yueqing Technology để hiện thực hóa bản sao kỹ thuật số của thế giới vật lý và thế giới ảo cho các tình huống ứng dụng robot, hiện thực hóa phần mềm lập trình ngoại tuyến robot iRobotCAM và giao tiếp PLC của robot cần trí thông minh, điều khiển chính xác các chuyển động khớp, v.v., sử dụng mô hình ứng dụng bản sao kỹ thuật số cho thấy mối tương quan giữa việc dạy robot và lập trình ứng dụng robot, đồng thời hiển thị trực quan các tình huống ứng dụng của robot.
Đối với việc ứng dụng bản sao kỹ thuật số, hiện nay có hai hướng kỹ thuật khác nhau trong ngành.
Lộ trình thực tế ảo tập trung vào hiệu ứng mô phỏng thường sử dụng các công cụ trò chơi như Unity làm công nghệ cơ bản và phát triển thêm dựa trên đặc điểm của ngành để tùy chỉnh các hiệu ứng ứng dụng mô phỏng cần thiết.
Dựa trên mô hình vật lý, bằng cách thiết lập cầu nối giữa thế giới vật lý và thế giới ảo, tương tác giữa thực tế và ảo được hiện thực hóa và một bản sao kỹ thuật số thực sự được hiện thực hóa.
Về mặt ứng dụng công nghệ, thế giới song sinh kỹ thuật số được hình thành bằng cách mô hình hóa thế giới vật lý thường đòi hỏi nhiều đầu tư R&D hơn khi đối mặt với các mô hình trừu tượng rời rạc của các yếu tố chính của thế giới thực vật lý. Tuy nhiên, đối với các ứng dụng công nghiệp, kiến trúc song sinh kỹ thuật số thực sự này có giá trị cao hơn. Nó có thể trình bày hiệu quả các cảnh vật lý phức tạp trong thế giới ảo và cũng có thể thúc đẩy hơn nữa những thay đổi trong thế giới vật lý thông qua việc gỡ lỗi ảo hơn nữa của robot.
Đối với lĩnh vực ứng dụng của robot công nghiệp, về mặt lựa chọn kỹ thuật phần mềm lập trình ngoại tuyến robot iRobotCAM, lựa chọn iRobotCAM dựa trên dữ liệu CAD để đạt được khả năng tương tác giữa thế giới vật lý và thế giới ảo, và hiện thực hóa các ứng dụng song sinh kỹ thuật số thực sự. Cụ thể, phần mềm lập trình ngoại tuyến robot công nghiệp iRobotCAM hiện thực hóa việc xây dựng môi trường lập trình ảo thuận tiện của iRobotCAM như thế nào?
- Mô phỏng lắp ráp động cơ, bao gồm rô-bốt, thiết bị thay đổi nhanh, dây chuyền băng tải và nhiều cảm biến khác nhau
- Mô phỏng đồng bộ thực và ảo, thu thập dữ liệu dây chuyền sản xuất và ánh xạ dữ liệu bộ điều khiển chuyển động và dữ liệu PLC vào hệ thống mô phỏng
- Hỗ trợ mô phỏng hệ thống bao gồm các dây chuyền băng tải, nhiều robot và hệ thống vật liệu. Hỗ trợ mô phỏng hệ thống bao gồm các dây chuyền băng tải, nhiều robot và hệ thống vật liệu.
Bằng cách nhanh chóng xây dựng các kịch bản ứng dụng và kết nối với các mô-đun truyền thông tương ứng, iRobotCAM có thể hiện thực hóa các kịch bản gỡ lỗi ảo của robot và ứng dụng bản sao kỹ thuật số.
Giới thiệu về iRobotCAM :
Công nghệ Yueqing chuyên phát triển giải pháp trọn gói cho thiết kế dây chuyền sản xuất, lập trình robot ngoại tuyến và gỡ lỗi ảo.
Trang web iRobotCAM: www.iRobotCAM.com,Email: cooperation@iRobotCAM.com


