บทคัดย่อ: การประมวลผลด้วยเลเซอร์ของหุ่นยนต์มีการใช้กันมากขึ้นเรื่อยๆ และการเขียนโปรแกรมและการจำลองอย่างรวดเร็วของเทคโนโลยีการประมวลผลของหุ่นยนต์สามารถตรวจสอบความถูกต้องของกระบวนการได้อย่างง่ายดาย ในฐานะตัวแทนของซอฟต์แวร์การเขียนโปรแกรมออฟไลน์ของหุ่นยนต์ในประเทศ iRobotCAM ซึ่งใช้กระบวนการการเขียนโปรแกรมที่เป็นมิตรของ iRobotCAM สามารถบรรลุการเขียนโปรแกรมกระบวนการและการตรวจสอบการจำลองได้ นอกจากนี้ยังให้ความสะดวกในการประมวลผลด้วยเลเซอร์ของเครื่องจักรอีกด้วย
การเกิดของเทคโนโลยีการประมวลผลใดๆ ก็ตามก็เพื่อแก้ไขปัญหาบางประเภทในแอปพลิเคชันอุตสาหกรรม การใช้งานเลเซอร์กำลังแพร่หลายมากขึ้นเรื่อยๆ โดยเฉพาะอย่างยิ่งเมื่อสามารถควบคุมพลังงานของเลเซอร์ได้ เทคโนโลยีการประมวลผลที่ซับซ้อนยิ่งขึ้นก็จะเกิดขึ้นได้ จึงสามารถใช้กับการตัดด้วยเลเซอร์แบบสองแกนถึงห้าแกนแบบเรียบง่าย หรือการบินที่ซับซ้อนยิ่งขึ้นและชิ้นส่วนอื่นๆ นอกจากนี้ สาขาการเชื่อมด้วยเลเซอร์ยังตอบสนองความต้องการของกระบวนการของชิ้นส่วนประเภทต่างๆ อีกด้วย เพื่อให้ใช้การประมวลผลด้วยเลเซอร์แบบหุ่นยนต์ได้ดีขึ้น นอกเหนือจากความสามารถของฮาร์ดแวร์ของเลเซอร์เองแล้ว ยังมีการกำหนดข้อกำหนดเพิ่มเติมสำหรับความสะดวกและความแม่นยำของเส้นทางการสร้างกระบวนการและการจำลองอีกด้วย
สำหรับการประมวลผลด้วยเลเซอร์แบบหุ่นยนต์ โดยนำความยากของเทคโนโลยีการตัดด้วยเลเซอร์มาเป็นตัวอย่าง มีดังต่อไปนี้เป็นหลัก
- ประสิทธิภาพในการวางตำแหน่งและการแก้ไขต่ำและการปรับตัวที่ไม่ดี : วิธีการวางตำแหน่งเลเซอร์เส้นหรือการวางตำแหน่งตัวต้านทานมีข้อจำกัด จุดตัดของเลเซอร์เส้นนั้นไวต่อการรบกวน และการวางตำแหน่งตัวต้านทานต้องมีการวางตำแหน่งชิ้นงาน การวางตำแหน่งและการแก้ไข หากมีความเบี่ยงเบนในการวางตำแหน่งชิ้นงาน ก็อาจเกิดความล้มเหลวในการวางตำแหน่งได้ง่าย สำหรับชิ้นงานขนาดใหญ่หรือซับซ้อน จำเป็นต้องสแกนขอบทั้งหมดทีละชิ้น ซึ่งมีประสิทธิภาพน้อยกว่า และวิธีการเหล่านี้มักจะให้การแก้ไขตำแหน่งเฉพาะที่เท่านั้น และการปรับตัวที่ไม่ดีกับชิ้นส่วนที่มีรูปร่างพิเศษเป็นรูปโค้ง
- การวางแผนเส้นทางการเคลื่อนที่ของหุ่นยนต์ : แม้ว่าการตั้งโปรแกรมเส้นทางการเคลื่อนที่ของหุ่นยนต์จะมีความยืดหยุ่น แต่ในงานตัดที่ซับซ้อนหรือละเอียดอ่อนบางงาน การจะปรับเส้นทางการเคลื่อนที่ของหุ่นยนต์ให้เหมาะสมเพื่อปรับปรุงประสิทธิภาพและคุณภาพในการตัดยังคงเป็นความท้าทาย
- การบำรุงรักษาและการสอบเทียบอุปกรณ์ : หุ่นยนต์ตัดเลเซอร์เกี่ยวข้องกับส่วนประกอบความแม่นยำหลายชิ้น เช่น ตัวปล่อยเลเซอร์ เซ็นเซอร์ และแขนหุ่นยนต์ การบำรุงรักษาและการสอบเทียบส่วนประกอบเหล่านี้มีความสำคัญต่อการรักษาความแม่นยำในการตัดและยืดอายุการใช้งานของอุปกรณ์ อย่างไรก็ตาม การบำรุงรักษาและการสอบเทียบเป็นประจำ รวมถึงการตอบสนองต่อความล้มเหลวของอุปกรณ์อย่างรวดเร็ว ล้วนเป็นปัญหาที่ต้องเผชิญในกระบวนการตัดเลเซอร์ด้วยหุ่นยนต์
iRobotCAM เป็นซอฟต์แวร์จำลองและการเขียนโปรแกรมหุ่นยนต์แบบออฟไลน์ที่ตอบสนองความต้องการด้านกระบวนการประมวลผลด้วยเลเซอร์ของหุ่นยนต์ โดยอิงตามงานวิจัยและการพัฒนาที่สะสมในด้านการเชื่อมในช่วง 10 ปีที่ผ่านมา
- ด้วยการใช้ความสามารถในการปรับขนาดของแพลตฟอร์ม CAD สามมิติ ทำให้สามารถแยกเส้นทางการเชื่อมเลเซอร์ได้อัตโนมัติ และยังสามารถควบคุมเส้นทางเลเซอร์ได้อย่างแม่นยำอีกด้วย
- ด้วยประสบการณ์หลายปีในการวิจัยและพัฒนาเครื่องยนต์ฟิสิกส์หุ่นยนต์ เราจึงสามารถจำลองกระบวนการเลเซอร์ของหุ่นยนต์ได้อย่างรวดเร็ว และสร้างฝาแฝดทางดิจิทัลของกระบวนการกลึงได้
- การใช้โมดูลสร้างวิถีและเพิ่มประสิทธิภาพวิถีของ iRobotCAM สามารถปรับวิถีของหุ่นยนต์ได้โดยอัตโนมัติเพื่อหลีกเลี่ยงการชน จุดเดี่ยว และจุดที่ไม่สามารถเข้าถึงได้
- ด้วยการรวมการออกแบบสายการผลิตของ iRobotCAM เข้ากับการเขียนโปรแกรมและการจำลองหุ่นยนต์ iRobotCAM จึงสามารถออกแบบและจำลองระดับสายการผลิตได้ ซึ่งบรรลุการผสานรวมการออกแบบและการจำลองเข้าด้วยกัน
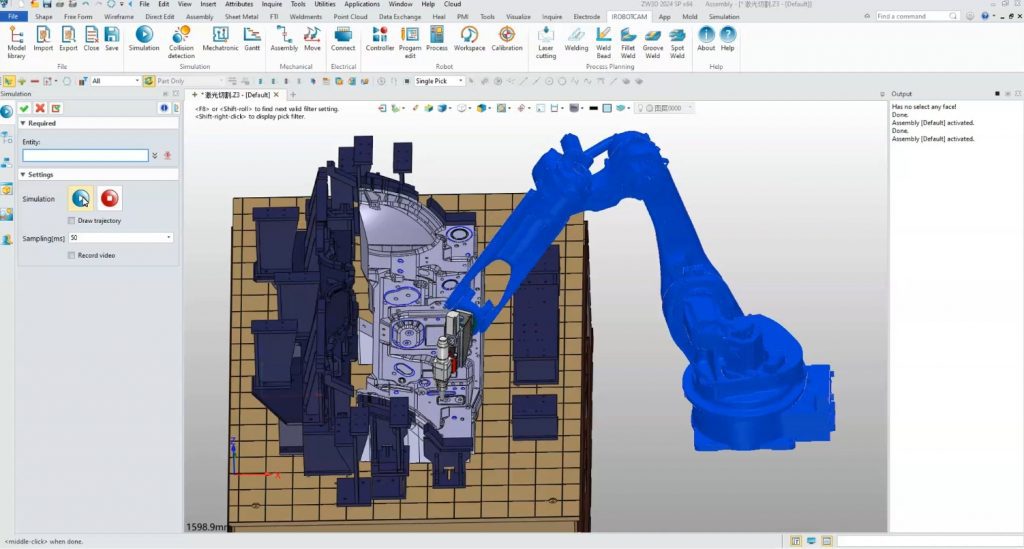
มาดูกันว่า iRobotCAM สามารถใช้งานการเขียนโปรแกรมและจำลองการประมวลผลเลเซอร์ของหุ่นยนต์ได้อย่างง่ายดายเพียงใด
เกี่ยวกับ Yueqing Technology :
Yueqing Technology มุ่งมั่นที่จะสร้างแพลตฟอร์มการเขียนโปรแกรมออฟไลน์สำหรับหุ่นยนต์ iRobotCAM แบบเปิด ซึ่งเป็นโซลูชันดิจิทัลที่ผสานการออกแบบแนวความคิดด้านไฟฟ้ากลของสายการผลิต การจำลองการเขียนโปรแกรมการประมวลผลหุ่นยนต์ และการแก้จุดบกพร่องแบบเสมือน


