บทคัดย่อ: Yueqing Technology เผยแพร่เอกสารเผยแพร่เกี่ยวกับการเขียนโปรแกรมการประมวลผลด้วยเลเซอร์และเทคโนโลยีการจำลอง ซึ่งอธิบายถึงความยากลำบากในการควบคุมความแม่นยำสูงของการประยุกต์ใช้เทคโนโลยีการประมวลผลด้วยเลเซอร์ และหารือเพิ่มเติมเกี่ยวกับรูปแบบการเคลื่อนที่และการจำลองของการประมวลผลด้วยเลเซอร์ วิธีการใช้ iRobotCAM อย่างมีประสิทธิภาพเพื่อทำให้การประมวลผลและการจำลองด้วยเลเซอร์เสร็จสมบูรณ์ และปรับปรุงการพัฒนาอุปกรณ์ของสถานการณ์การใช้งานกระบวนการด้วยเลเซอร์และประสิทธิภาพการใช้งานกระบวนการด้วยเลเซอร์ให้ดีขึ้นอย่างมาก
- ภาพรวมของอุตสาหกรรมเลเซอร์
อุตสาหกรรมเลเซอร์มีขนาดการจ้างงานและขนาดตลาดในอนาคตที่ใหญ่ และอุตสาหกรรมนี้อยู่ในช่วงของการพัฒนาอย่างรวดเร็ว
- ลักษณะเฉพาะของเทคโนโลยีเลเซอร์
ลักษณะเฉพาะของกระบวนการที่สำคัญที่สุดของเลเซอร์คือความแม่นยำสูง เพื่อทำความเข้าใจการประยุกต์ใช้เทคโนโลยีเลเซอร์เพิ่มเติม เราจะเริ่มจากสถานการณ์อุปกรณ์ของการประยุกต์ใช้เทคโนโลยีเลเซอร์ และใช้การพัฒนาและการประยุกต์ใช้เครื่องมือเครื่องจักรเลเซอร์และการประมวลผลด้วยเลเซอร์ของหุ่นยนต์เป็นการใช้งานทั่วไป เพื่อวิเคราะห์ปัญหาและอธิบายวิธีแก้ปัญหาเพิ่มเติม
- การพัฒนาและการประยุกต์ใช้เครื่องมือเครื่องจักรเลเซอร์
เริ่มจากกระบวนการพัฒนาอุปกรณ์ของเครื่องมือเครื่องจักรเลเซอร์ เราจะสามารถเข้าใจถึงความยากลำบากในการนำเทคโนโลยีเลเซอร์ไปประยุกต์ใช้กับเครื่องมือเครื่องจักรได้มากขึ้น
กระบวนการพัฒนาเครื่องมือเครื่องจักรเลเซอร์: การสร้างแบบจำลองโครงสร้างสามมิติ < การสร้างแบบจำลองเครื่องกลไฟฟ้าและการจำลองการเคลื่อนที่ < การสร้างวิถีและการแก้จุดบกพร่องเสมือนจริง < การประมวลผลหลังการประมวลผลและการจำลองการประมวลผล
ข้อความต่อไปนี้ใช้ iRobotCAM เป็นโซลูชันซอฟต์แวร์สำหรับการพัฒนาเครื่องมือเครื่องจักรเลเซอร์และการแก้ไขข้อบกพร่อง เพื่ออธิบายวิธีการนำการพัฒนาเครื่องมือเครื่องจักรเลเซอร์และการแก้ไขข้อผิดพลาดแบบเสมือนจริงไปใช้ทีละขั้นตอน และตระหนักถึงการผลิตจำนวนมากและการใช้งานเครื่องมือเครื่องจักรเลเซอร์
1) การสร้างแบบจำลองโครงสร้างสามมิติ: iRobotCAM ใช้ลักษณะเฉพาะของแพลตฟอร์ม CAD สามมิติเพื่อสร้างแบบจำลองดิจิทัลของโครงสร้างสามมิติของเครื่องมือเครื่องจักรได้อย่างรวดเร็ว
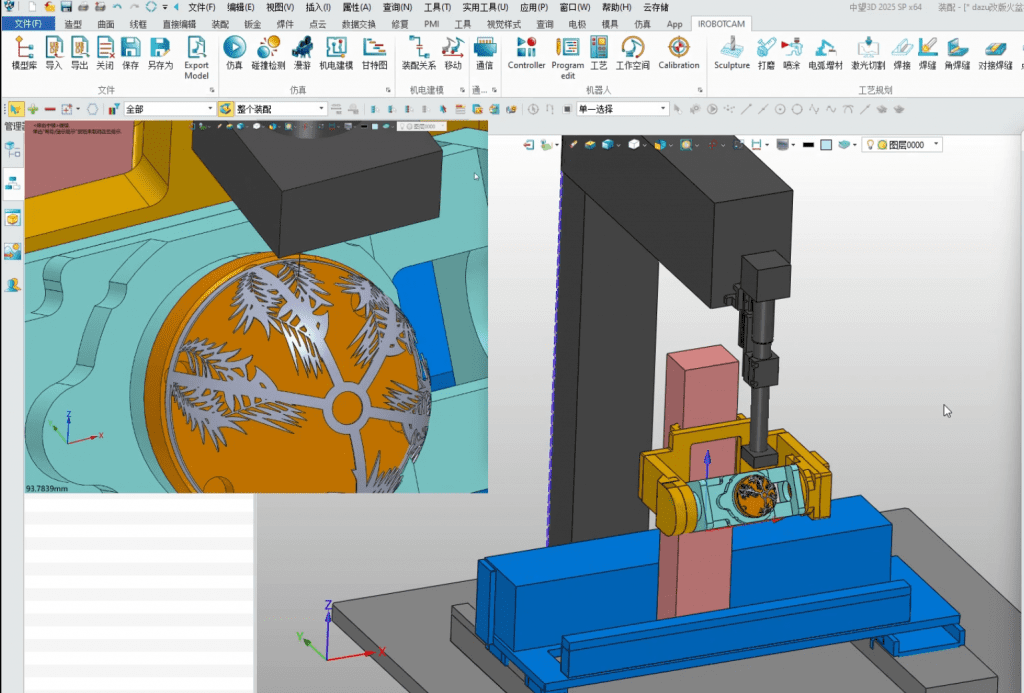
2) การสร้างแบบจำลองไฟฟ้ากลและการจำลองการเคลื่อนไหว: iRobotCAM มีโมดูลการสร้างแบบจำลองไฟฟ้ากลที่สามารถใช้สร้างแบบจำลองและออกแบบสายการผลิตและแก้ไขข้อบกพร่องหุ่นยนต์แบบเสมือนจริง ก่อนการผลิตจริง กระบวนการประมวลผลเลเซอร์สามารถจำลองในสภาพแวดล้อมเสมือนจริงเพื่อค้นหาและแก้ไขปัญหาที่อาจเกิดขึ้นล่วงหน้า เช่น การรบกวนจากการชนของการเคลื่อนไหวของหุ่นยนต์ การตรวจสอบเอกฐานของหุ่นยนต์ ความสามารถในการเข้าถึงและการชน และข้อผิดพลาดของเส้นทางเลเซอร์ เป็นต้น เพื่อลดข้อผิดพลาดและความเสี่ยงในการแก้ไขข้อบกพร่องจริง และปรับปรุงประสิทธิภาพและความปลอดภัยของการผลิต
3) การสร้างวิถีและการดีบักแบบเสมือน: พัฒนาบนพื้นฐานของแพลตฟอร์ม ZW3D สามารถใช้กับอัลกอริธึมวิถี 2 แกนถึง 5 แกนต่างๆ ของ ZW3D ได้ ทำให้หุ่นยนต์มีอัลกอริธึมวิถีที่แม่นยำคล้ายกับซอฟต์แวร์ CAM ในระหว่างกระบวนการประมวลผลเลเซอร์ และสามารถโฟกัสลำแสงเลเซอร์ไปที่ส่วนการประมวลผลได้อย่างแม่นยำ ทำให้สามารถตัดด้วยเลเซอร์ เชื่อม แกะสลัก และกระบวนการอื่นๆ ได้อย่างแม่นยำ ช่วยให้มั่นใจในคุณภาพและความสม่ำเสมอของการประมวลผล
4) การประมวลผลหลังการผลิตและการจำลองการทำงาน: โมดูลการประมวลผลหลังการผลิตที่สะดวกสบายของ iRobotCAM สามารถสร้างโค้ดได้อย่างรวดเร็วและแสดงผลการจำลองการทำงานได้อย่างชาญฉลาด
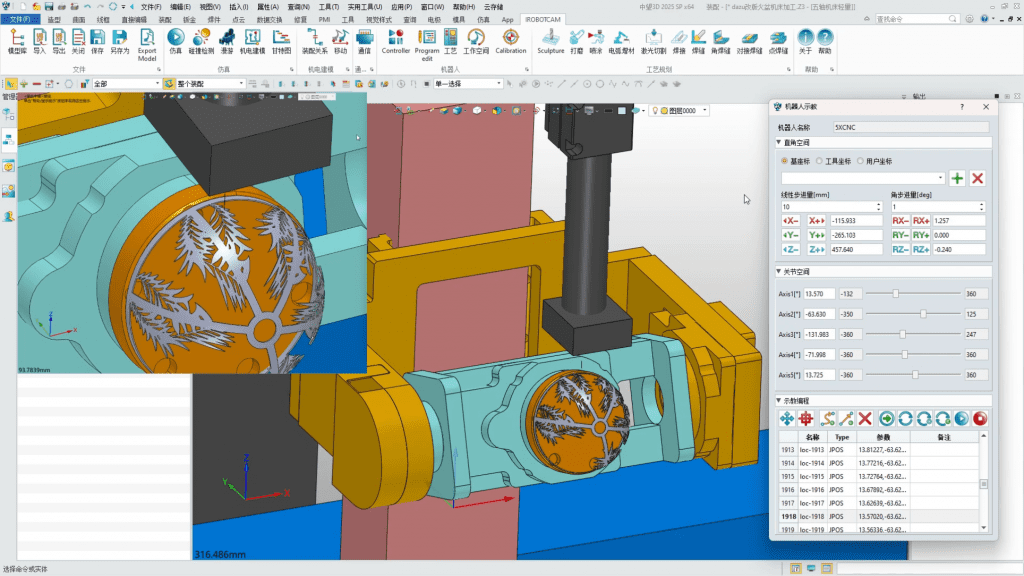
มาดูกันว่า iRobotCAM ใช้เครื่องมือเครื่องจักร 5 แกนในการประมวลผลและจำลองด้วยเลเซอร์ได้อย่างไร:
4. การประยุกต์ใช้เทคโนโลยีเลเซอร์หุ่นยนต์
เทคโนโลยีเลเซอร์หุ่นยนต์มีความแม่นยำสูงเป็นหลัก และความสามารถในการผลิตที่มีความแม่นยำสูงโดยใช้เลเซอร์เป็นพื้นฐานสำหรับอุตสาหกรรมต่างๆ เช่น อวกาศ ยานยนต์ และเครื่องจักร เพื่อให้ได้อุปกรณ์ที่มีประสิทธิภาพหรือความแม่นยำสูง สำหรับอุตสาหกรรมหุ่นยนต์ ความยากลำบากในการประยุกต์ใช้เทคโนโลยีเลเซอร์คืออะไร? จะใช้เทคโนโลยีเลเซอร์หุ่นยนต์ให้ได้ผลอย่างรวดเร็วได้อย่างไร?
ประการแรกสำหรับเทคโนโลยีการประมวลผลด้วยเลเซอร์หุ่นยนต์ กระบวนการทั่วไปมีดังนี้:
นำเข้าหุ่นยนต์และชิ้นงาน > การจัดวางตำแหน่งชิ้นงานและการปรับเทียบหุ่นยนต์ > การสร้างโปรแกรมเส้นทางการเคลื่อนที่ > การจำลองฉากทั้งหมด > เอาต์พุตโค้ดและการประมวลผลหุ่นยนต์
จากกระบวนการข้างต้น จะเห็นได้ว่าเทคโนโลยีเลเซอร์เน้นไปที่การสร้างสภาพแวดล้อมดิจิทัลและเอาต์พุตและการจำลองโค้ด มาดูตัวอย่างซอฟต์แวร์การเขียนโปรแกรมออฟไลน์ iRobotCAM เพื่ออธิบายวิธีใช้ iRobotCAM เพื่อให้เกิดการประยุกต์ใช้เทคโนโลยีเลเซอร์ของหุ่นยนต์อย่างมีประสิทธิภาพ
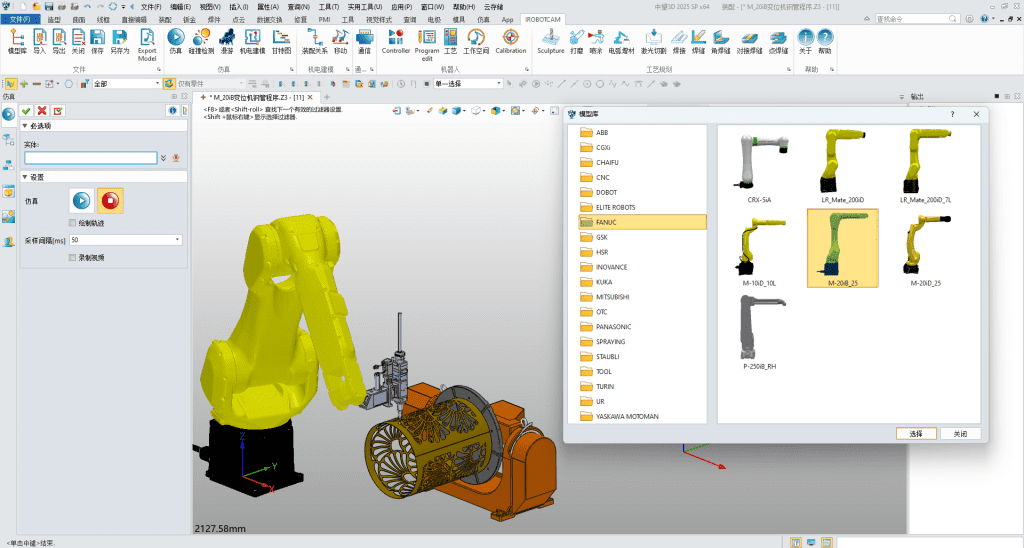
1) การใช้ iRobotCAM ซึ่งใช้ความสามารถของแพลตฟอร์ม CAD 3D ทำให้สามารถสร้างแบบจำลองการแปลงอุปกรณ์และกระบวนการเป็นดิจิทัลได้อย่างรวดเร็ว
2) การใช้ไลบรารีเครื่องจักรของ iRobotCAM ช่วยให้คุณสร้างหุ่นยนต์หรือเครื่องมือที่เกี่ยวข้องกับแอปพลิเคชันเลเซอร์ได้อย่างรวดเร็ว หลีกเลี่ยงความจำเป็นในการสร้างไลบรารีชิ้นส่วนพื้นฐานซ้ำแล้วซ้ำเล่าในอนาคต และช่วยให้บริษัทต่างๆ ใช้โมเดลดิจิทัลได้อย่างมีประสิทธิภาพมากขึ้น
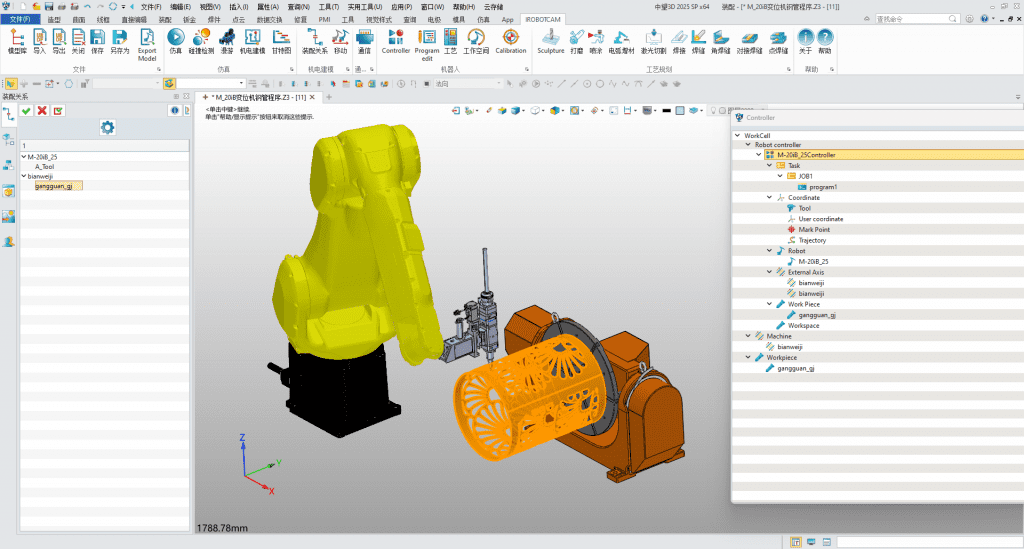
3) ด้วยการใช้ฟังก์ชันการจัดตำแหน่งเฉพาะของ iRobotCAM จึงสามารถจัดตำแหน่งชิ้นงานได้อย่างรวดเร็วและแม่นยำตามความต้องการในการประมวลผลด้วยเลเซอร์ โดยเฉพาะอย่างยิ่ง iRobotCAM สามารถจัดตำแหน่งชิ้นงานภายใต้เงื่อนไขการทำงานต่างๆ ได้โดยอิงตามคุณลักษณะ CAD ของชิ้นงาน
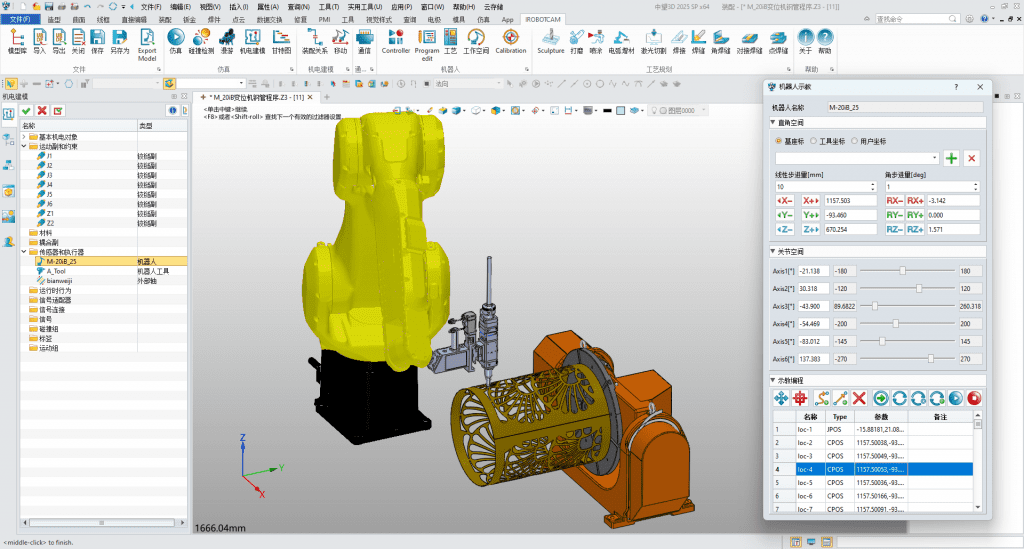
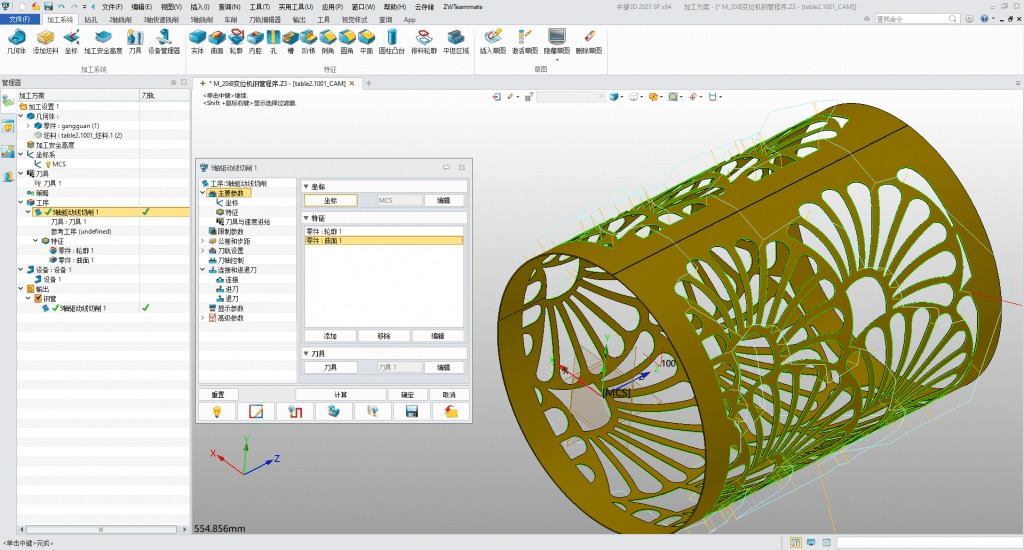
4) การใช้ความสามารถในการสร้างวิถีการเคลื่อนที่ของ iRobotCAM ทำให้สามารถสร้างวิถีการเคลื่อนที่หลายแกนที่ซับซ้อนบนพื้นผิวโค้งได้ และสามารถนำกระบวนการเลเซอร์ไปใช้กับหุ่นยนต์ที่มีแกนมากกว่า 7 แกนได้
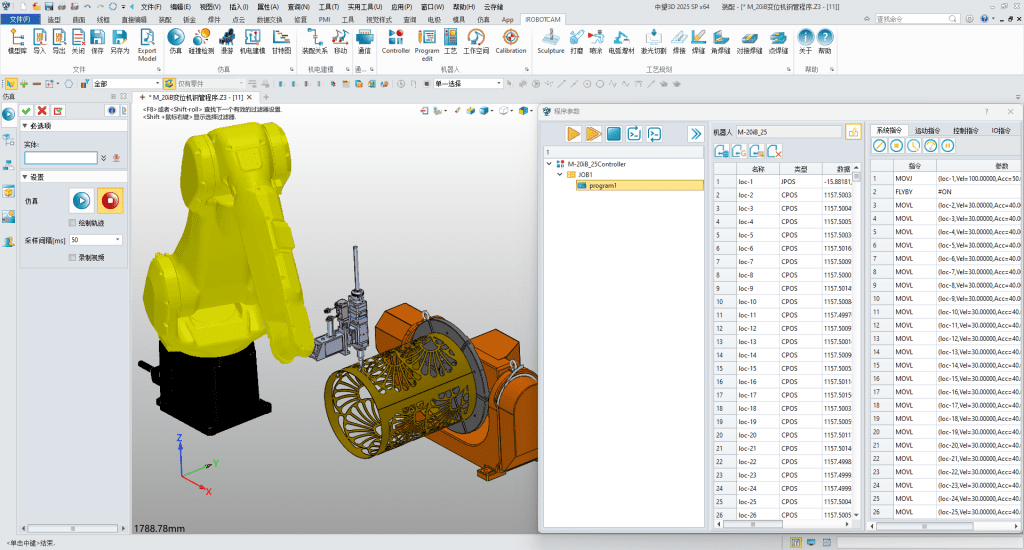
5) ความสามารถการแก้จุดบกพร่องเสมือนหุ่นยนต์ของ iRobotCAM สามารถใช้เพื่อดำเนินการเขียนโปรแกรมฉากเลเซอร์หุ่นยนต์และการจำลองเสมือน และดูผลของการประยุกต์ใช้เทคโนโลยีหุ่นยนต์ได้อย่างมีประสิทธิภาพ
6. ด้วยการใช้ความสามารถหลังการประมวลผลของ iRobotCAM คุณสามารถปรับใช้กับหุ่นยนต์หลากหลายประเภทได้อย่างมีประสิทธิภาพ รวมถึง FANUC, ABB, Yaskawa, KUKA, GSK, STEP, Estun, Turin ฯลฯ และใช้ซอฟต์แวร์ชุดเดียวเพื่อจัดการหลายแบรนด์หรือหลายอุปกรณ์ได้อย่างมีประสิทธิภาพ
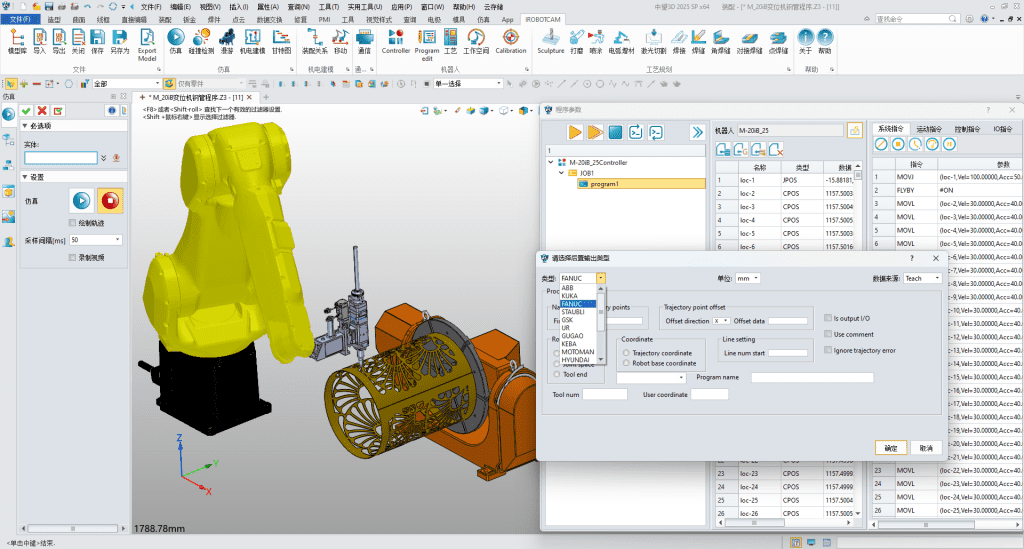
ต่อไป มาดูกันว่า iRobotCAM ใช้หุ่นยนต์อย่างไรในการประมวลผลรูปแบบกลวง 5 แกน ด้วยความสามารถในการตั้งโปรแกรมที่ยืดหยุ่นของ iRobotCAM จึงสามารถสร้างวิถี 5 แกนและจำลองหุ่นยนต์ได้อย่างรวดเร็ว
5. สรุป
จุดสำคัญของการประยุกต์ใช้เทคโนโลยีเลเซอร์คือความแม่นยำ ซึ่งต้องใช้การเขียนโปรแกรมและการจำลองเพื่อให้มีการออกแบบสถาปัตยกรรมที่มีความแม่นยำสูง จากกรณีการใช้งานเครื่องประมวลผลเลเซอร์ 5 แกนทั่วไปข้างต้นและสถานการณ์การใช้งานการประมวลผลเลเซอร์หลายแกนของหุ่นยนต์ จะเห็นได้ว่าการเลือก iRobotCAM เป็นโซลูชันสำหรับการประมวลผลด้วยเลเซอร์และการแก้จุดบกพร่องเสมือนจริงสามารถแก้ปัญหาความแม่นยำสูงพื้นฐานของการประมวลผลด้วยเลเซอร์ได้อย่างมีประสิทธิภาพ และการขยายตัวต่อไป เนื่องจากเป็นการใช้งานกระบวนการของการประมวลผลด้วยเลเซอร์ iRobotCAM จึงสามารถขยายการใช้งานได้ในสถานการณ์อื่นๆ มากขึ้น เช่น การตัดด้วยเลเซอร์ การหุ้มด้วยเลเซอร์ การผลิตแบบเติมส่วนโค้ง ฯลฯ เนื่องมาจากสถาปัตยกรรมทางเทคนิคที่เปิดกว้าง และสะท้อนถึงข้อได้เปรียบทางเทคนิคที่ชัดเจนในด้านความแม่นยำสูง
เกี่ยวกับ Yueqing Technology
Yueqing Technology มุ่งมั่นที่จะสร้างแพลตฟอร์มการเขียนโปรแกรมออฟไลน์สำหรับหุ่นยนต์ iRobotCAM แบบเปิด ซึ่งเป็นโซลูชันดิจิทัลที่ผสานการออกแบบแนวความคิดด้านไฟฟ้ากลของสายการผลิต การจำลองการเขียนโปรแกรมการประมวลผลหุ่นยนต์ และการแก้จุดบกพร่องแบบเสมือน
เว็บไซต์ iRobotCAM: www.iRobotCAM.com


