Skip to content
YueQing Technology
ซอฟต์แวร์การเขียนโปรแกรมออฟไลน์สำหรับหุ่นยนต์ iRobotCAM
หน้าแรก
ผลิตภัณฑ์
การแนะนำ
ดาวน์โหลดและติดตั้ง
บทช่วยสอน
แอปพลิเคชัน
ข่าว
เกี่ยวกับเรา
เกี่ยวกับบริษัท
ติดต่อเรา
语言 | Language
中文 (中国)
日本語
한국어
Čeština
Español
Deutsch
English
Français
Italiano
Polski
Português
Русский
Türkçe
ไทย
Tiếng Việt
YueQing Technology
ซอฟต์แวร์การเขียนโปรแกรมออฟไลน์สำหรับหุ่นยนต์ iRobotCAM
Navigation Menu
Navigation Menu
หน้าแรก
ผลิตภัณฑ์
การแนะนำ
ดาวน์โหลดและติดตั้ง
บทช่วยสอน
แอปพลิเคชัน
ข่าว
เกี่ยวกับเรา
เกี่ยวกับบริษัท
ติดต่อเรา
语言 | Language
中文 (中国)
日本語
한국어
Čeština
Español
Deutsch
English
Français
Italiano
Polski
Português
Русский
Türkçe
ไทย
Tiếng Việt
โซลูชันการเขียนโปรแกรมหุ่นยนต์ออฟไลน์และการควบคุมการทำงานแบบเสมือน iRobotCAM V1.6
Based on ZW3D CAD/CAM
ดาวน์โหลดเวอร์ชันทดลองใช้
iRobotCAM เปิดตัวโมดูลจำลองหุ่นยนต์ พร้อมรองรับระบบหุ่นยนต์ ROS
อ่านเพิ่มเติม
Previous
Next
โซลูชันแบบครบวงจร
การออกแบบสายการผลิตหุ่นยนต์/การเขียนโปรแกรมออฟไลน์/การทดสอบระบบเสมือนจริง
เครื่องมือจำลองฟิสิกส์ที่เชื่อถือได้
การตรวจสอบการทำงานแบบเสมือนด้วยเวิร์กสเตชันหลายเครื่อง
สถาปัตยกรรมบูรณาการกระบวนการเปิด
บูรณาการโมดูลกระบวนการที่กำหนดเองได้อย่างรวดเร็ว
การออกแบบและการจำลองหุ่นยนต์
รองรับการนำเข้ารูปแบบข้อมูลนับสิบรูปแบบ รวมถึง Solidworks, NX, Catia, Creo, Inventor, STEP, Parasolid เป็นต้น
รองรับการกำหนดข้อต่อหุ่นยนต์ การควบคุมสัญญาณ ฯลฯ
รองรับการนำเข้าหรือส่งออก URDF รองรับการส่งออกข้อต่อ ความเฉื่อย และพารามิเตอร์อื่นๆ และอำนวยความสะดวกในการใช้งานระบบหุ่นยนต์ เช่น ระบบ ROS หรือซอฟต์แวร์ฝึกจำลอง
iRobotCAM มีกลไกไดนามิกที่สมบูรณ์เพื่อให้แน่ใจว่าเอาท์พุต URDF ตรงตามข้อกำหนดการจำลองของซอฟต์แวร์ เช่น ROS
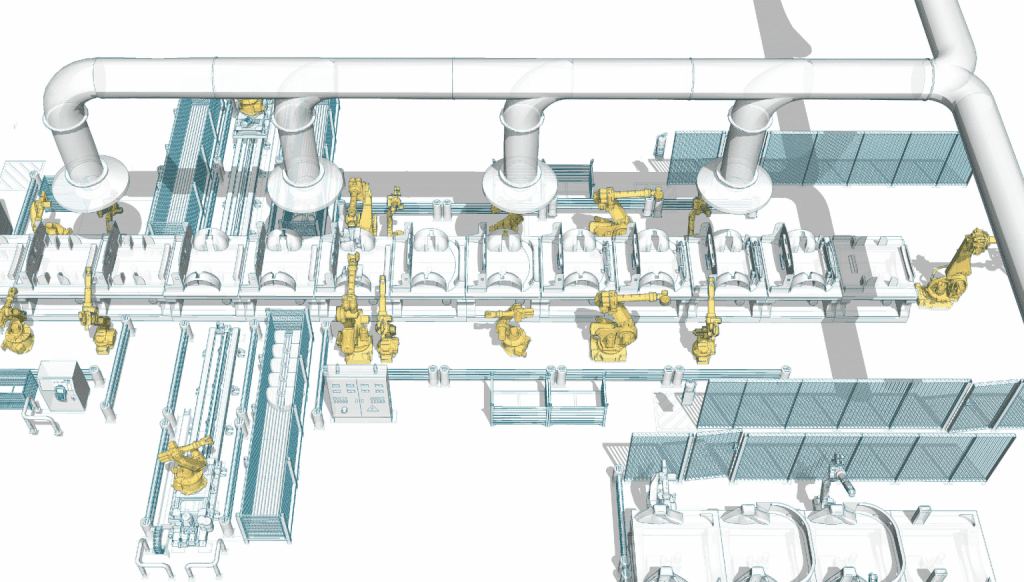
การออกแบบสายการผลิตหุ่นยนต์
ใช้ซอฟต์แวร์การออกแบบพารามิเตอร์เพื่อตอบสนองการออกแบบสถานีงานหุ่นยนต์เดี่ยวและสายการผลิตหุ่นยนต์
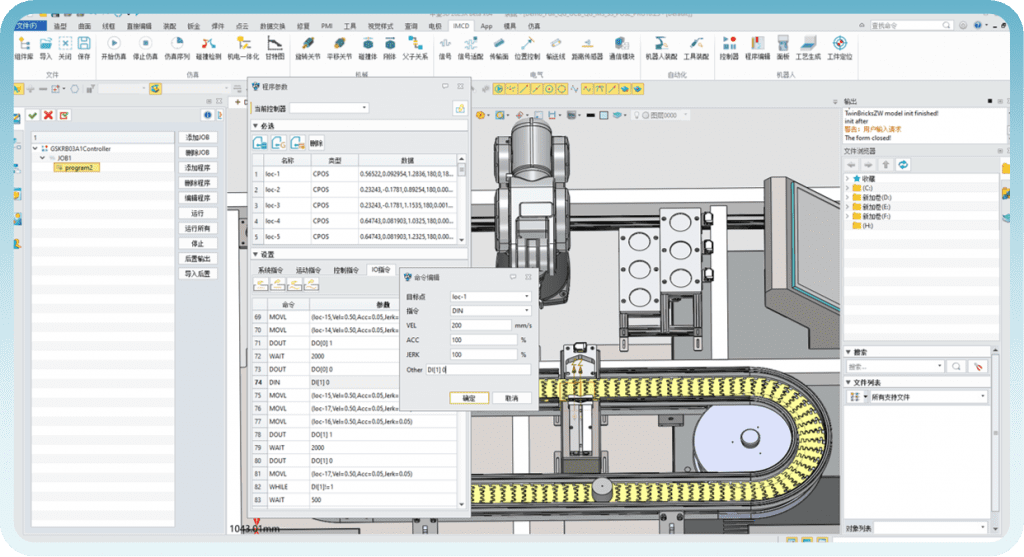
การเขียนโปรแกรมหุ่นยนต์แบบออฟไลน์
กระบวนการเขียนโปรแกรมสำนักงาน:
นำเข้าโมเดลหุ่นยนต์–> การวางแผนกระบวนการ–> การจำลองกระบวนการเครื่องจักร–> การเพิ่มประสิทธิภาพระบบเวิร์กสเตชัน–> เอาต์พุตรหัสโพสต์
การตรวจสอบการเขียนโปรแกรม:
รองรับการแยกส่วนโปรแกรมหุ่นยนต์ ซึ่งสามารถตรวจสอบและเพิ่มประสิทธิภาพโปรแกรมหุ่นยนต์ได้
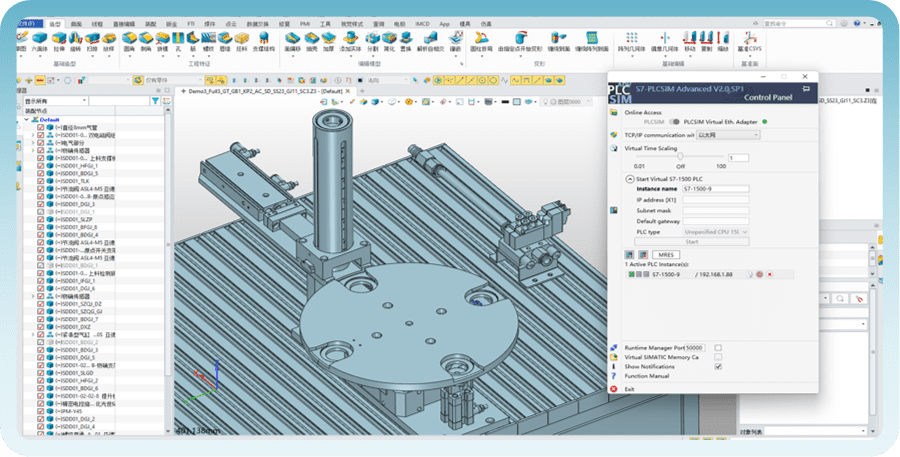
การทดลองใช้งานหุ่นยนต์เสมือนจริง
ด้วยระบบแก้ไขข้อบกพร่องเสมือนจริงและการตรวจสอบเสมือนจริง จึงสามารถซิงโครไนซ์การทำงานของเวิร์กสเตชันระบบหุ่นยนต์เสมือนจริงและเวิร์กสเตชันระบบหุ่นยนต์จริงได้
รองรับการจำลองการสื่อสาร IO หลายเครื่อง การซิงโครไนซ์หุ่นยนต์หลายตัว และการวางแผนการเชื่อมโยงหุ่นยนต์หลายแกน
เรียนรู้เพิ่มเติมเกี่ยวกับโซลูชันการทำงานด้วยหุ่นยนต์ iRobotCAM
ดาวน์โหลดแคตตาล็อก
Phone: 18923224286
关注iRobotCAM视频号
关注iRobotCAM抖音号