Thiết kế robot/thiết kế dây chuyền sản xuất/lập trình ngoại tuyến/vận hành ảo
Công cụ mô phỏng vật lý đáng tin cậy
Vận hành ảo với nhiều máy trạm
Kiến trúc tích hợp quy trình mở
Tích hợp nhanh chóng các mô-đun quy trình tùy chỉnh
Thiết kế và mô phỏng Robot
Hỗ trợ nhập hàng chục định dạng dữ liệu bao gồm Solidworks, NX, Catia, Creo, Inventor, STEP, Parasolid, v.v.;
Hỗ trợ định nghĩa khớp robot, điều khiển tín hiệu, v.v.
Hỗ trợ nhập hoặc xuất URDF, hỗ trợ xuất khớp nối, quán tính và các thông số khác, đồng thời tạo điều kiện thuận lợi cho việc sử dụng các hệ thống robot như hệ thống ROS hoặc phần mềm đào tạo mô phỏng;
iRobotCAM có một công cụ động lực học hoàn chỉnh để đảm bảo URDF đầu ra đáp ứng được các yêu cầu mô phỏng của phần mềm như ROS.
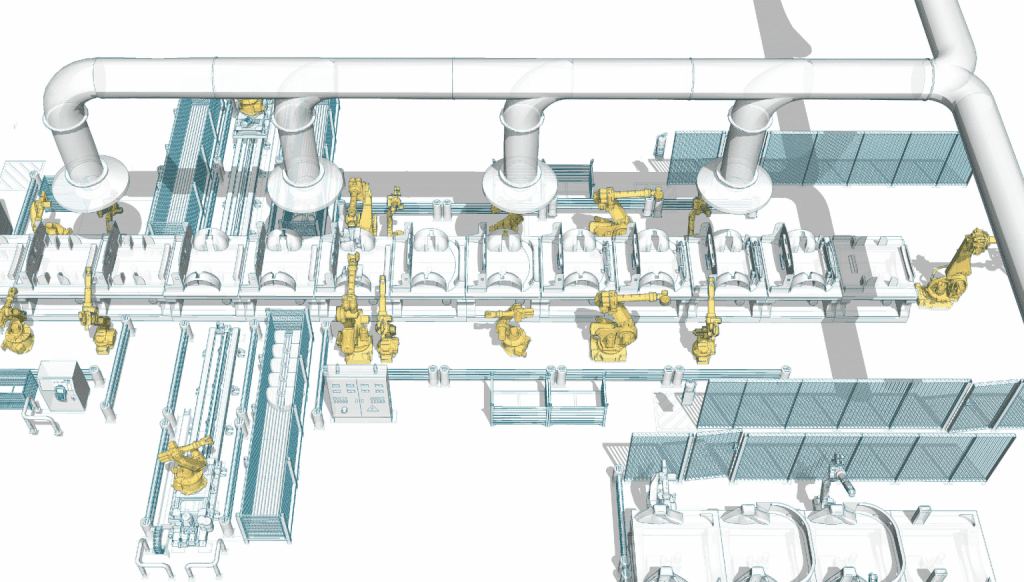
Thiết kế dây chuyền sản xuất robot
Sử dụng phần mềm thiết kế tham số để đáp ứng thiết kế các trạm làm việc robot đơn lẻ và dây chuyền sản xuất robot.
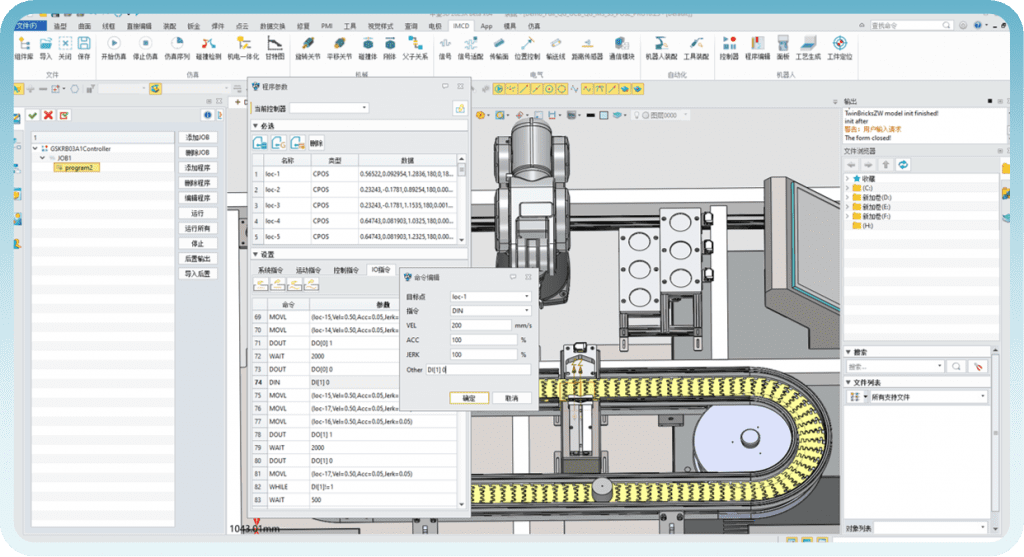
Lập trình robot ngoại tuyến
Quy trình lập trình văn phòng: Nhập mô hình robot–>Lập kế hoạch quy trình–>Mô phỏng quy trình gia công–>Tối ưu hóa hệ thống máy trạm–>Xuất mã bưu chính
Xác minh lập trình: Hỗ trợ dịch ngược chương trình robot, có thể xác minh và tối ưu hóa các chương trình robot
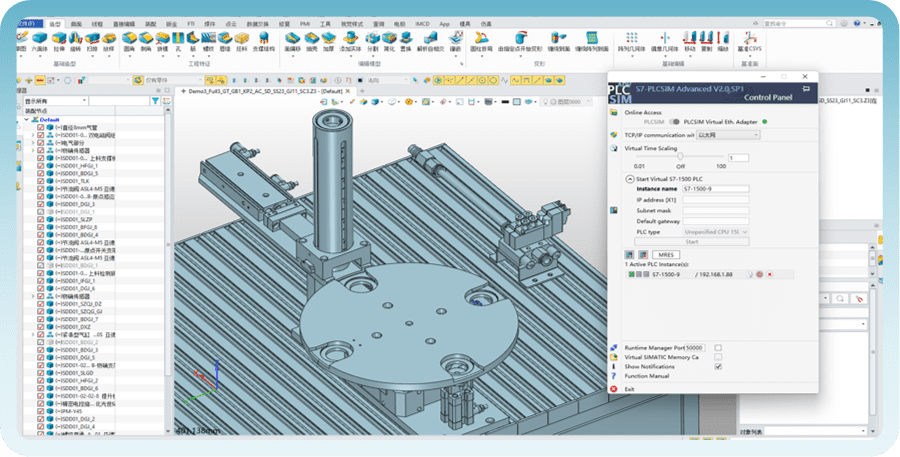
Robot ảo
Được trang bị chức năng gỡ lỗi ảo và giám sát ảo, các hành động của trạm làm việc hệ thống robot ảo và trạm làm việc hệ thống robot thực tế có thể được đồng bộ hóa;
Hỗ trợ mô phỏng giao tiếp IO đa máy, đồng bộ hóa nhiều robot và lập kế hoạch liên kết đa trục của robot.
Tìm hiểu thêm về các giải pháp gia công robot iRobotCAM