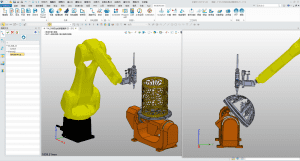
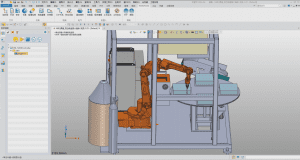
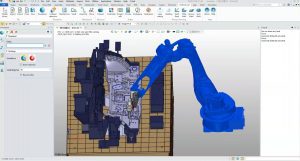
เหตุใดจึงควรเลือกซอฟต์แวร์การเขียนโปรแกรมหุ่นยนต์ออฟไลน์ iRobotCAM เป็นตัวเลือกแรกสำหรับการประมวลผลด้วยเลเซอร์ของหุ่นยนต์
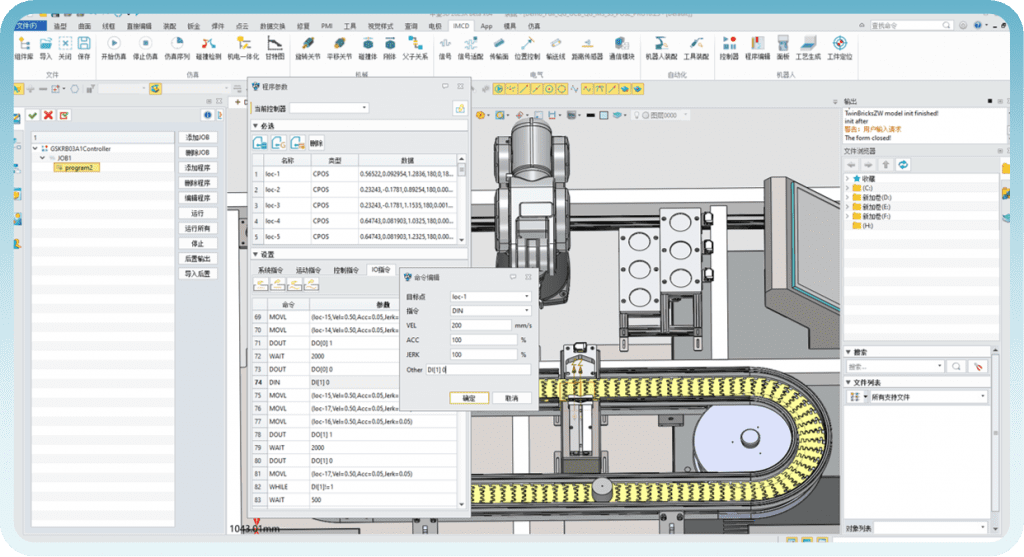
วิธีการนำการเขียนโปรแกรมและการจำลองการประมวลผลการตัดด้วยเลเซอร์ของหุ่นยนต์มาใช้ได้อย่างรวดเร็วด้วย iRobotCAM
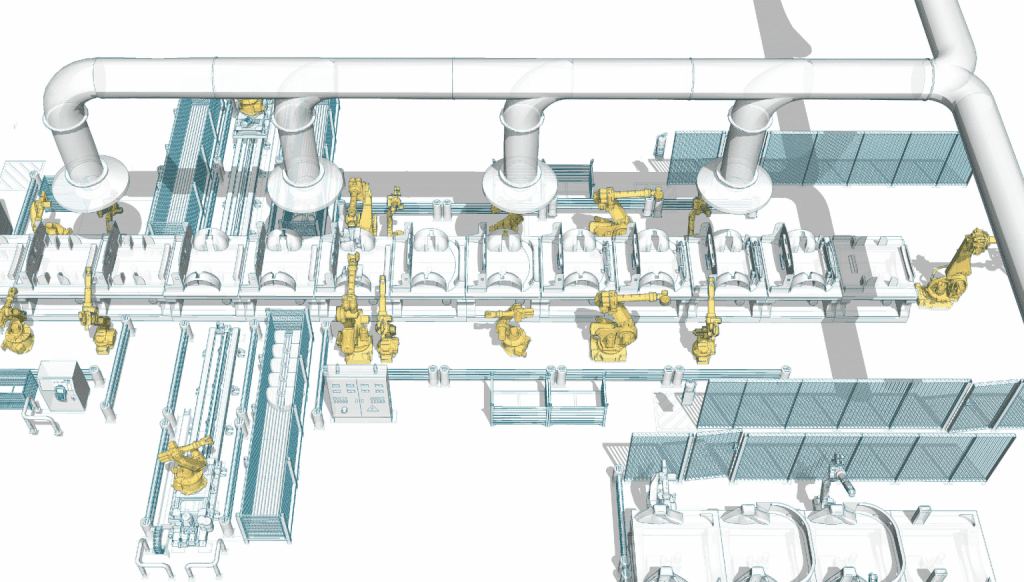
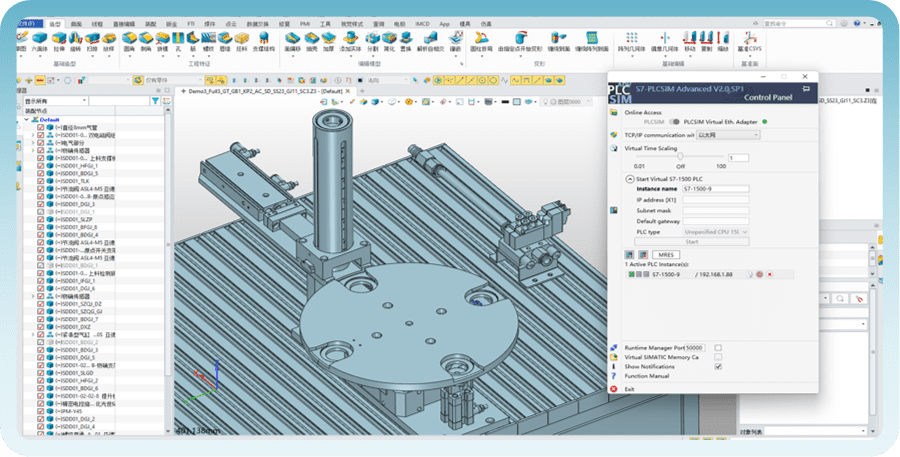
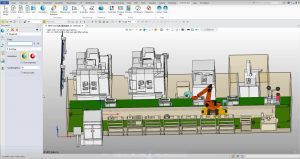
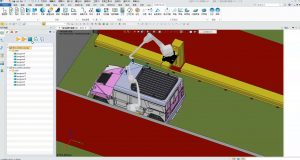
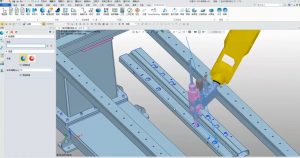
วิทยาลัยเทคนิคกวางตุ้งแห่งอุตสาหกรรมและการพาณิชย์แบ่งปันวิธีการใช้ประโยชน์จาก iRobotCAM ในการออกแบบและทดสอบสายการผลิตแบบเสมือนจริงอย่างง่ายดาย
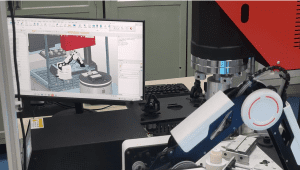
iRobotCAM มอบประสบการณ์การเขียนโปรแกรมหุ่นยนต์ออฟไลน์ที่ดีที่สุดบน ZW3D และได้รับรางวัล ZWSOFT Excellent Developer Award
วิทยาลัยเทคนิคกวางตุ้งแห่งอุตสาหกรรมและการพาณิชย์แบ่งปันวิธีการใช้ประโยชน์จาก iRobotCAM ในการออกแบบและทดสอบสายการผลิตแบบเสมือนจริงอย่างง่ายดาย
YueQing Technology และ Zhihui Robotics บรรลุข้อตกลงความร่วมมือเพื่อส่งเสริมโซลูชันการฉีดพ่นด้วยหุ่นยนต์ระดับไฮเอนด์ในอุตสาหกรรมยานยนต์
Yangzhou Shinius Automation และ Yueqing Technology บรรลุความร่วมมือเพื่อบรรลุการออกแบบสายการผลิตอัตโนมัติอัจฉริยะ