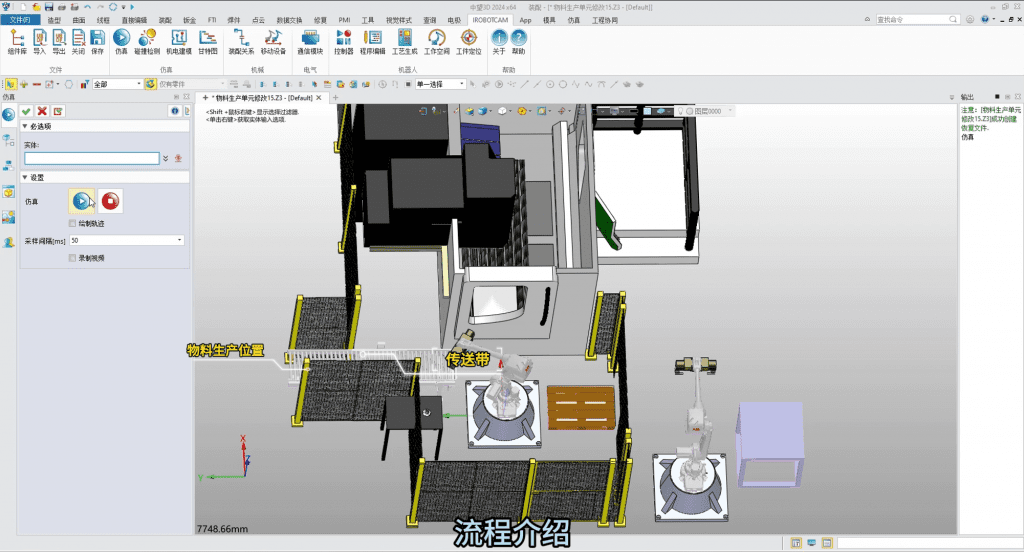
Come base per la progettazione e il debug della simulazione di una linea di produzione robotizzata, l’unità di produzione dei materiali ha derivato metodi di progettazione per diversi componenti in modo pratico. Tornando alla fonte, dal punto di vista del flusso complessivo dei materiali, il processo della maggior parte degli scenari di materiali di base è simile alla seguente modalità:
- Nella scena, l’ingresso del nastro trasportatore produce materiali, trasporta i materiali fino alla fine, rileva i materiali alla fine e il nastro trasportatore si ferma.
- Il robot nell’area di carico riceve il segnale per agganciare il materiale alla macchina utensile per la lavorazione e il carico e infine lo posiziona sulla piastra trasportatrice per il trasporto.
- Il robot nell’area di scarico attende che la piastra trasportatrice trasporti fuori il materiale e, dopo aver ricevuto il segnale, fissa il materiale sul tavolo di posizionamento.
- L’ingresso del nastro trasportatore continua a produrre materiali e il robot entra nel ciclo di carico e scarico.
Il design funzionale è estremamente pratico. L’unità di produzione materiali è in grado di generare automaticamente materiali per diverse linee di produzione. La finestra funzionale dell’unità di produzione materiali viene definita incorporando oggetti di produzione, sedi di produzione e frequenze di produzione.
La sua capacità di espansione funzionale è notevole. Specificamente progettato per i requisiti dell’unità materiale, il potente motore fisico di iRobotCAM è in grado di soddisfare le esigenze della simulazione del movimento multi-robot anche negli scenari più complessi.
Prendiamo come esempio l’applicazione del carico e dello scarico del robot. iRobotCAM può implementare rapidamente i seguenti progetti:
in primo luogo, importare il modello del robot nella scena dalla libreria componenti e assemblarlo sul robot impostando separatamente gli utensili del robot.
In secondo luogo, il software consente l’aggiunta di marcatori tramite apprendimento drag-and-drop, insieme all’aggiunta di istruzioni del programma del robot, controllando così il programma del robot per eseguire le funzioni di carico e scarico.
Infine, è possibile aggiungere più robot alla scena e le istruzioni del programma del robot vengono gestite dal controller multi-robot per eseguire rispettivamente le funzioni dell’area di carico e scarico.
In qualità di unità di produzione di materiali, esploreremo più approfonditamente nel seguente video come iRobotCAM realizza in modo pratico l’automazione dell’unità di produzione di materiali robotizzata.
Informazioni su Yueqing Technology
Yueqing Technology è impegnata a realizzare una piattaforma aperta di programmazione offline dei robot iRobotCAM, ovvero una soluzione digitale che integra la progettazione concettuale elettromeccanica delle linee di produzione, la simulazione della programmazione dell’elaborazione dei robot e il debug virtuale.
Sito web di iRobotCAM: www.iRobotCAM.com; Contatto: cooperation@iRobotCAM.com
Riepilogo: Rivolgendosi agli scenari applicativi dell’automazione delle unità di materiali robotizzati, iRobotCAM, un software di programmazione offline per robot domestici sviluppato da YueQing Technology, fornisce un pratico modulo di progettazione delle unità di materiali, in grado di stabilire rapidamente una comunicazione con il PLC e realizzare l’automazione in base alle esigenze delle unità di materiali.
Come base per la progettazione e il debug della simulazione di una linea di produzione robotizzata, l’unità di produzione dei materiali ha derivato metodi di progettazione per diversi componenti in modo pratico. Tornando alla fonte, dal punto di vista del flusso complessivo dei materiali, il processo della maggior parte degli scenari di materiali di base è simile alla seguente modalità:
- Nella scena, l’ingresso del nastro trasportatore produce materiali, trasporta i materiali fino alla fine, rileva i materiali alla fine e il nastro trasportatore si ferma.
- Il robot nell’area di carico riceve il segnale per agganciare il materiale alla macchina utensile per la lavorazione e il carico e infine lo posiziona sulla piastra trasportatrice per il trasporto.
- Il robot nell’area di scarico attende che la piastra trasportatrice trasporti fuori il materiale e, dopo aver ricevuto il segnale, fissa il materiale sul tavolo di posizionamento.
- L’ingresso del nastro trasportatore continua a produrre materiali e il robot entra nel ciclo di carico e scarico.
Il design funzionale è estremamente pratico. L’unità di produzione materiali è in grado di generare automaticamente materiali per diverse linee di produzione. La finestra funzionale dell’unità di produzione materiali viene definita incorporando oggetti di produzione, sedi di produzione e frequenze di produzione.
La sua capacità di espansione funzionale è notevole. Specificamente progettato per i requisiti dell’unità materiale, il potente motore fisico di iRobotCAM è in grado di soddisfare le esigenze della simulazione del movimento multi-robot anche negli scenari più complessi.
Prendiamo come esempio l’applicazione del carico e dello scarico del robot. iRobotCAM può implementare rapidamente i seguenti progetti:
in primo luogo, importare il modello del robot nella scena dalla libreria componenti e assemblarlo sul robot impostando separatamente gli utensili del robot.
In secondo luogo, il software consente l’aggiunta di marcatori tramite apprendimento drag-and-drop, insieme all’aggiunta di istruzioni del programma del robot, controllando così il programma del robot per eseguire le funzioni di carico e scarico.
Infine, è possibile aggiungere più robot alla scena e le istruzioni del programma del robot vengono gestite dal controller multi-robot per eseguire rispettivamente le funzioni dell’area di carico e scarico.
In qualità di unità di produzione di materiali, esploreremo più approfonditamente nel seguente video come iRobotCAM realizza in modo pratico l’automazione dell’unità di produzione di materiali robotizzata.
data:image/gif;base64,R0lGODlhAQABAAAAACH5BAEKAAEALAAAAAABAAEAAAICTAEAOw==
Informazioni su Yueqing Technology
Yueqing Technology è impegnata a realizzare una piattaforma aperta di programmazione offline dei robot iRobotCAM, ovvero una soluzione digitale che integra la progettazione concettuale elettromeccanica delle linee di produzione, la simulazione della programmazione dell’elaborazione dei robot e il debug virtuale.
Sito web di iRobotCAM: www.iRobotCAM.com; Contatto: cooperation@iRobotCAM.com


