Аннотация: Столкнувшись с проблемой высокого порога и высокой стоимости платформы моделирования и обучения роботов, компания Yueqing Technology использует собственные технологические преимущества в области программного обеспечения для роботов, чтобы выпустить модуль моделирования роботов на основе ядра трехмерной геометрии, расширить интерфейс URDF и открыть возможности моделирования и анализа роботов ROS.
Столкнувшись с проблемой высоких пороговых значений и высокой стоимости платформы моделирования и обучения роботов, компания Yueqing Technology использовала свои технические преимущества в отрасли программного обеспечения для роботов, чтобы выпустить модуль моделирования роботов iRobotCAM на основе платформы ядра 3D-геометрии.
- Благодаря возможностям моделирования iRobotCAM и возможностям собственного физического движка iRobotCAM может быстро создавать и управлять моделями роботов и симуляциями физического поведения.
- Благодаря расширенным интерфейсам импорта и экспорта URDF дополнение iRobotCAM подключается к роботам ROS, позволяя пользователям объединять моделирование роботов и имитацию роботов для более эффективного обучения физической модели робота.
Ниже в качестве примера рассматривается простейший промышленный робот, чтобы подробнее рассмотреть, как использовать iRobotCAM для моделирования робота и создания обучающей модели:
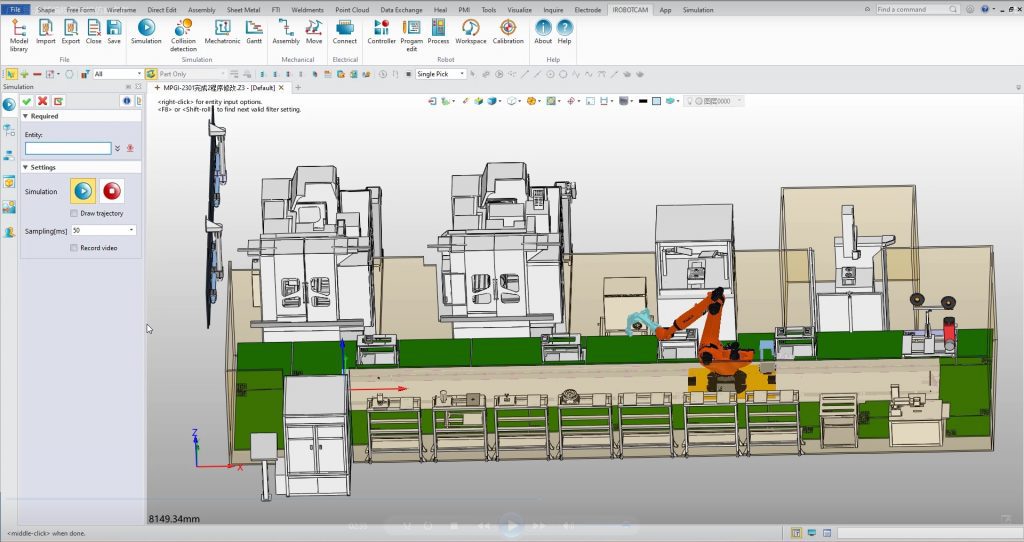
- Цифровое 3D-моделирование сцен
- Используя функцию 3D-моделирования, iRobotCAM может создавать сложные 3D-модели и выполнять полное цифровое моделирование сцен.
- Поддержка импорта iges, STEP, Solidworks, Creo, NX, Catia, Inventor, Parasolid и других 3D-форматов для повторного использования существующих 3D-моделей и повышения эффективности построения цифровой сцены робота.
- Библиотека мехатронного проектирования и робототехники
- Создание среды данных датчиков: поддержка систем сигналов ПЛК, включая Siemens, Mitsubishi, Inovance и другие бренды, а также поддержка настройки большего количества устройств доступа к сигналам
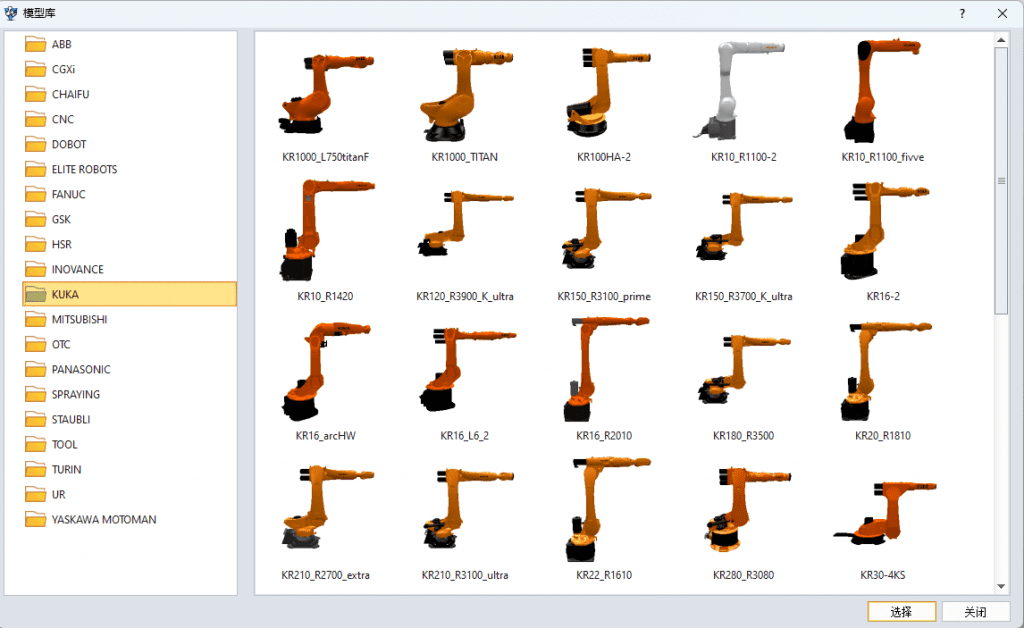
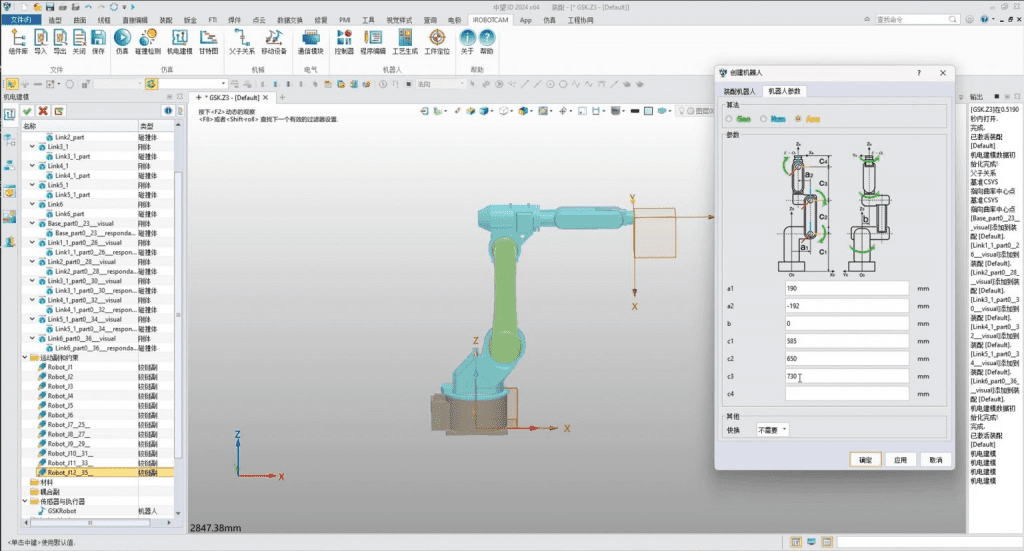
- Создание библиотеки роботов: для промышленных роботов вы можете использовать встроенные библиотеки роботов, включая ABB, Kuka, Yaskawa, Fanuc, Estun, Guangzhou CNC, Huazhong CNC, Yuejiang, AUBO и Turing, для создания имитационных моделей роботов или создать собственную библиотеку роботов с помощью функций настройки роботов. Для роботов-людей или стальных роботов можно по мере необходимости устанавливать подробную информацию о сочленениях соответствующих частей, а также формировать общее описание сочленений, обнаружение столкновений и т. д. для формирования конкретной библиотеки гуманоидных или колесных роботов.
- Обучение роботов
- Создание модели планирования траектории робота: поддержка моделирования многомашинной связи ввода-вывода, синхронизации нескольких роботов и планирования многоосевых связей робота;
- Обучение физических моделей, обучаемых роботами: поддерживает моделирование физических характеристик с использованием собственного физического движка, включая требования к избеганию препятствий, анализ столкновений и другие модели данных, а также поддерживает расширение сторонних интерфейсов для поддержки алгоритмов обучения роботов в определенных сценариях.
- Стыковка данных с роботами ROS для совместной отладки
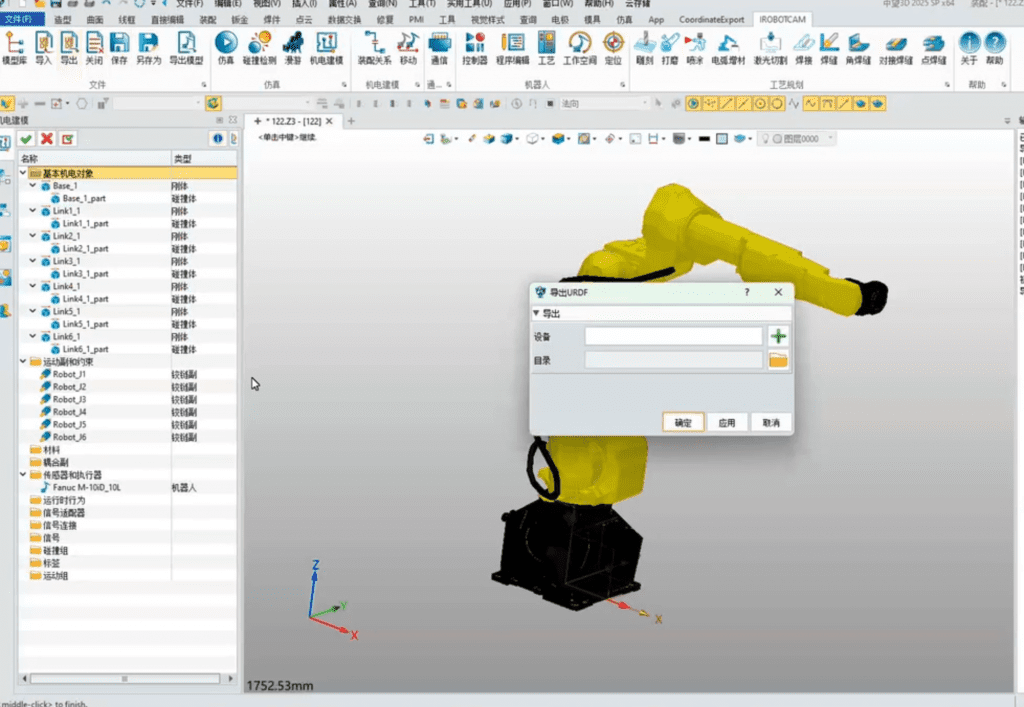
- Модель оптимизации робота, созданную с помощью iRobotCAM, можно экспортировать в URDF для дальнейшего моделирования и выполнения роботов ROS.
- С помощью функции импорта URDF базовую модель робота можно импортировать в iRobotCAM, а среду данных робота можно изменять и обучать в iRobotCAM для соответствия целям проектирования модели данных робота.
О компании Yueqing Technology
Компания Yueqing Technology стремится создать открытую платформу автономного программирования роботов iRobotCAM, которая представляет собой цифровое решение, объединяющее электромеханическое концептуальное проектирование производственных линий, моделирование программирования обработки роботов и виртуальную отладку.
Веб-сайт iRobotCAM: www.iRobotCAM.com; Контакты: cooperation@iRobotCAM.com


