Аннотация: Сложность роботизированной лазерной наплавки для обработки сложных деталей, таких как лопатки, заключается в использовании высокоточных характеристик, а технические архитектурные преимущества iRobotCAM на основе ядра 3D CAD позволяют эффективно удовлетворять требованиям высокой точности, чтобы реализовать высокоточную лазерную наплавку пятикоординатных лопаток.
Проектирование и обработка лопаток должны быть адаптированы к конкретным сценариям в соответствии с различными сценариями применения, от небольших лопаток вентилятора до авиационных лопаток, в соответствии с различными сценариями применения промышленных продуктов, элементы дизайна различаются, некоторые требуют ориентированной на красоту, некоторые требуют бесшумности, некоторые требуют основанной на производительности, и то, будет ли лопатка в конечном итоге соответствовать потребностям, включает в себя потребности различных отраслей промышленности, а также требования различных методов обработки, ядром является контроль точности, только точность контролируется эффективно, существует способ удовлетворить потребности различных сценариев. Если взять в качестве примера роботизированную лазерную наплавку лопаток, то iRobotCAM использует преимущества архитектуры на основе САПР и обладает преимуществами высокоточной архитектуры. Как эффективно применить ее для лазерной наплавки?
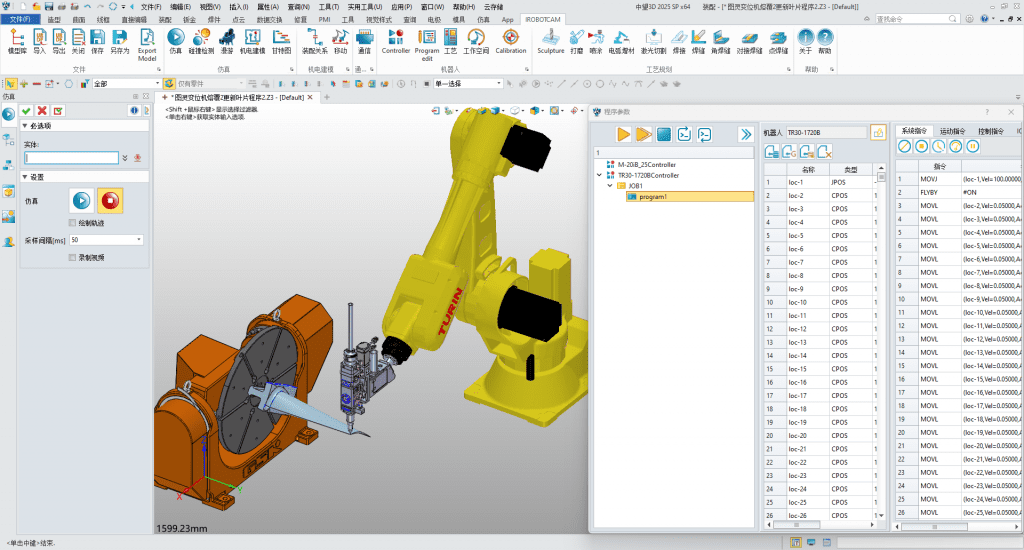
Для роботизированной лазерной обработки обычный процесс выглядит следующим образом:
Импорт робота и заготовки > позиционирование заготовки и калибровка робота > выполнение программирования траектории > моделирование всех сцен > вывод кода и обработка роботом
- Используя возможности iRobotCAM на основе платформы 3D CAD и глядя на 3D, можно быстро создать цифровую модель сценария применения робота.
- Используя электромеханический модуль iRobotCAM и предустановленную библиотеку роботов, вы можете определить соответствующих роботов, инструменты и т. д. для сцены робота.
- В соответствии с потребностями процесса лазерной обработки генерируются различные 2-5-осевые траектории, соответствующие требованиям траектории конкретных сценариев.
- На основе физического движка iRobotCAM моделируется, калибруется движение робота и выводится соответствующий код исполнения.
Помимо технической архитектуры, наиболее непосредственным восприятием пользователя является простота программирования программного обеспечения робота, а пользовательский опыт является одним из основных показателей. Честно говоря, прогресс промышленного программного обеспечения — это не работа одного дня, но от технической архитектуры до пользовательского опыта отечественное промышленное программное обеспечение достигло большого прогресса за последние годы. При таком количестве лет зарубежного программного обеспечения вы можете попробовать отечественное промышленное программное обеспечение; для выбора программного обеспечения для офлайн-программирования роботов вы можете попробовать iRobotCAM.
Рассмотрим в качестве примера использование робота Turin для реализации пятикоординатной лазерной обработки лезвий. Как iRobotCAM легко реализует пошаговую обработку лазерным роботом?
О компании Yueqing Technology
Компания Yueqing Technology стремится создать открытую платформу автономного программирования роботов iRobotCAM, которая представляет собой цифровое решение, объединяющее электромеханическое концептуальное проектирование производственных линий, моделирование программирования обработки роботов и виртуальную отладку.
Веб-сайт iRobotCAM: www.iRobotCAM.com, контакт: cooperation@iRobotCAM.com


