Abstrakt: Obtížnost zpracování robotického laserového plátování pro zpracování složitých obrobků, jako jsou čepele, spočívá ve využití vysoce přesných charakteristik a výhody technické architektury iRobotCAM založeného na jádru 3D CAD mohou efektivně splnit požadavky na vysokou přesnost, aby bylo možné realizovat vysoce přesné laserové zpracování plátování pětiosých čepelí.
Design a zpracování lopatek je třeba přizpůsobit konkrétním scénářům podle různých aplikačních scénářů, od malých lopatek ventilátoru až po lopatky pro letectví, podle různých scénářů použití průmyslových produktů, konstrukční prvky jsou různé, některé vyžadují orientaci na krásu, některé vyžadují založené na tichu, některé vyžadují založené na výkonu a zda lopatka konečně vyhovuje potřebám různých průmyslových odvětví, stejně jako požadavky na různé způsoby řízení, jádrem je pouze precizní způsob řízení, základem je přesnost aby vyhovovaly potřebám různých scénářů. Vezmeme-li jako příklad robotické laserové zpracování plátování lopatek, iRobotCAM využívá svou architekturu založenou na CAD a má výhody vysoce přesné architektury, jak ji efektivně aplikovat na zpracování laserového plátování?
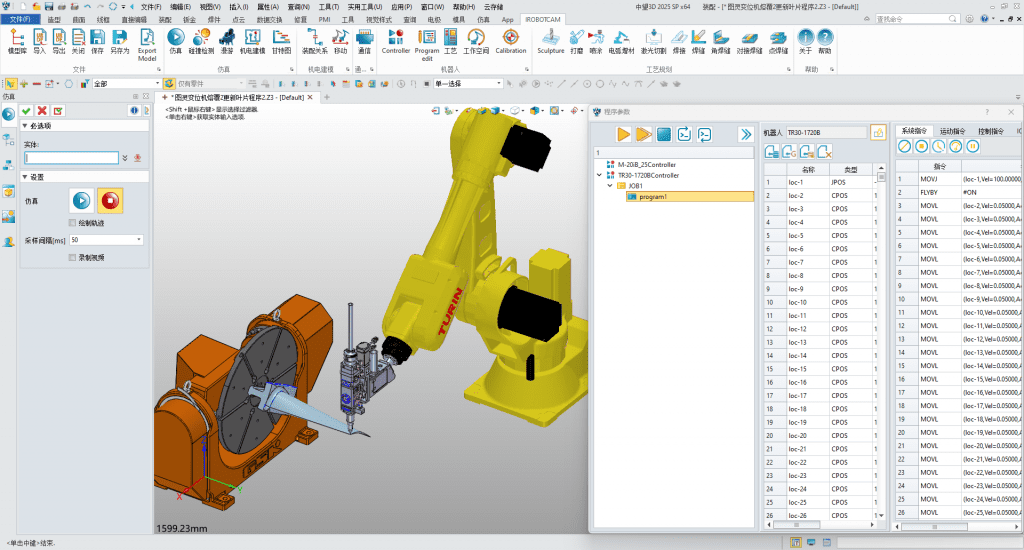
Pro aplikace robotického laserového zpracování je obvyklý proces následující:
Import robota a obrobku> umístění obrobku a kalibrace robota> realizace programování trajektorie> simulace všech scén> výstup kódu a zpracování robotem
- Pomocí charakteristik iRobotCAM založeného na 3D CAD platformě a pohledu na 3D můžete rychle vytvořit digitální model scénáře aplikace robota.
- Pomocí elektromechanického modulu iRobotCAM a přednastavené knihovny robotů můžete definovat relevantní roboty, nástroje atd. pro scénu robota
- Podle potřeb procesu laserového zpracování jsou generovány různé 2-osé až 5-osé trajektorie, aby byly splněny požadavky na trajektorie specifických scénářů
- Na základě fyzikálního enginu iRobotCAM je pohyb robota simulován, kalibrován a je vydán odpovídající prováděcí kód.
Kromě technické architektury nejpřímější uživatel vnímá, jak snadné je programování softwaru robota, a uživatelská zkušenost je jedním ze základních ukazatelů. Upřímně řečeno, pokrok průmyslového softwaru není práce na jeden den, ale od technické architektury až po uživatelskou zkušenost domácí průmyslový software udělal v posledních letech velký pokrok, s tolika lety zahraničního softwaru můžete vyzkoušet i domácí průmyslový software, pro výběr softwaru pro offline programování robotů můžete také vyzkoušet iRobotCAM.
Vezmeme-li jako příklad použití turínského robota k realizaci laserového zpracování opláštění pětiosých lopatek, jak iRobotCAM snadno realizuje robotické laserové zpracování krok za krokem?
O technologii Yueqing
Yueqing Technology se zavázala k vybudování otevřené offline programovací platformy robotů iRobotCAM, což je digitální řešení integrující elektromechanický koncepční návrh výrobních linek, simulaci programování zpracování robotů a virtuální ladění.
Webové stránky iRobotCAM: www.iRobotCAM.com, kontakt: cooperation@iRobotCAM.com


