Аннотация: Компания Wuhan Needs Intelligence заключила соглашение о сотрудничестве с компанией Nanjing Yueqing Technology с целью создания цифрового прототипа робота-двойника, демонстрации взаимосвязи между обучением робота и программированием его приложений, а также наглядной демонстрации сценариев применения робота.
Компания Wuhan Needs Intelligence заключила соглашение о сотрудничестве с компанией Nanjing Yueqing Technology с целью создания цифровых двойников физического и виртуального мира для сценариев применения роботов, реализации программного обеспечения для офлайн-программирования роботов iRobotCAM и связи с ПЛК роботов, которым требуются интеллект, точное управление движениями суставов и т. д. с использованием цифровой модели применения двойников, которая показывает взаимосвязь между обучением роботов и программированием приложений роботов, а также наглядно отображает сценарии применения роботов.
В настоящее время в отрасли существуют два различных технических пути применения цифровых двойников.
Маршрут виртуальной реальности, фокусирующийся на эффектах моделирования, обычно использует игровые движки, такие как Unity, в качестве базовой технологии и далее развивается на основе отраслевых характеристик для настройки требуемых эффектов приложения моделирования.
На основе физического моделирования, путем установления моста между физическим миром и виртуальным миром, реализуется взаимодействие между реальностью и виртуальностью, и реализуется настоящий цифровой двойник.
С точки зрения применения технологий, цифровой двойниковый мир, сформированный путем моделирования физического мира, часто требует больших инвестиций в НИОКР в условиях дискретных абстрактных моделей ключевых элементов физического реального мира. Однако для промышленных приложений эта настоящая архитектура цифрового двойника имеет большую ценность. Она может эффективно представлять сложные физические сцены в виртуальном мире, а также может дополнительно стимулировать изменения в физическом мире посредством дальнейшей виртуальной отладки роботов.
Для областей применения промышленных роботов, с точки зрения технического выбора программного обеспечения для офлайн-программирования роботов iRobotCAM, выбор iRobotCAM основан на данных CAD для достижения взаимодействия между физическим миром и виртуальным миром и реализации настоящих приложений цифрового двойника. В частности, как программное обеспечение для офлайн-программирования промышленных роботов iRobotCAM реализует конструкцию удобной виртуальной среды программирования iRobotCAM?
- Моделирование сборки двигателя, включая роботов, быстросменные устройства, конвейерные линии и различные датчики
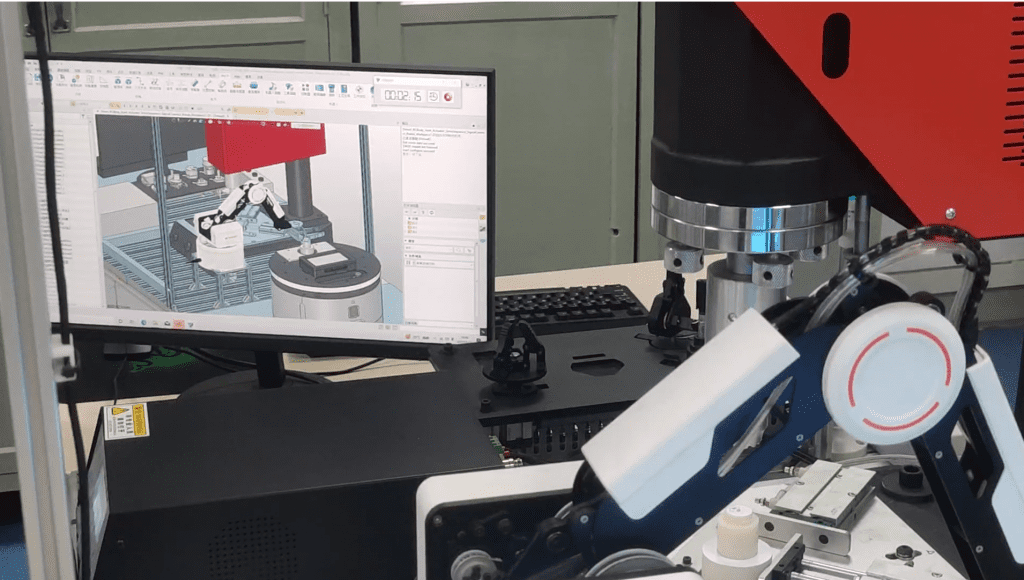
- Виртуальное и реальное синхронное моделирование, сбор данных производственной линии и отображение данных контроллера движения и данных ПЛК в системе моделирования
- Поддерживает системное моделирование, включая конвейерные линии, мультироботы и материальные системы. Поддерживает системное моделирование, включая конвейерные линии, мультироботы и материальные системы.
Благодаря быстрому созданию сценариев применения и подключению к соответствующим коммуникационным модулям iRobotCAM может реализовывать сценарии виртуальной отладки роботов и применения цифровых двойников.
О iRobotCAM :
Компания Yueqing Technology занимается разработкой комплексного решения для проектирования производственных линий, автономного программирования роботов и виртуальной отладки.
Веб-сайт iRobotCAM: www.iRobotCAM.com, Электронная почта: cooperation@iRobotCAM.com


