Аннотация: Компания Yueqing Technology выпустила официальный документ по программированию и моделированию лазерной обработки, в котором описываются трудности высокоточного управления применением технологии лазерной обработки, а также дополнительно обсуждаются траектория и схема моделирования лазерной обработки, способы эффективного использования iRobotCAM для завершения лазерной обработки и моделирования, а также значительного улучшения разработки оборудования для сценариев применения лазерной обработки и эффективности применения лазерной обработки.
- Обзор лазерной промышленности
Лазерная промышленность имеет огромный масштаб занятости и будущий размер рынка, и эта отрасль находится в периоде быстрого развития.
- Характеристики лазерной технологии
Самая большая характеристика процесса лазера — высокая точность. Чтобы лучше понять применение лазерной технологии, мы начнем со сценария оборудования применения лазерной технологии и возьмем разработку и применение лазерных станков и приложений лазерной обработки роботов в качестве типичных приложений для дальнейшего анализа их трудностей и дальнейшего объяснения решений.
- Разработка и применение лазерных станков
Начиная с процесса разработки оборудования для лазерных станков, мы можем глубже понять трудности применения и решения лазерной технологии на станках.
Процесс разработки лазерного станка: 3D-моделирование структуры < электромеханическое моделирование и моделирование движения < генерация траектории и виртуальная отладка < постобработка и моделирование обработки
Далее будет использовано программное решение iRobotCAM для разработки и отладки лазерных станков, чтобы пошагово объяснить, как реализовать разработку лазерных станков и виртуальную отладку, а также реализовать массовое производство и применение лазерных станков.
1) Моделирование трехмерной конструкции: iRobotCAM использует возможности платформы трехмерного САПР для быстрого создания цифровой модели трехмерной конструкции станка.
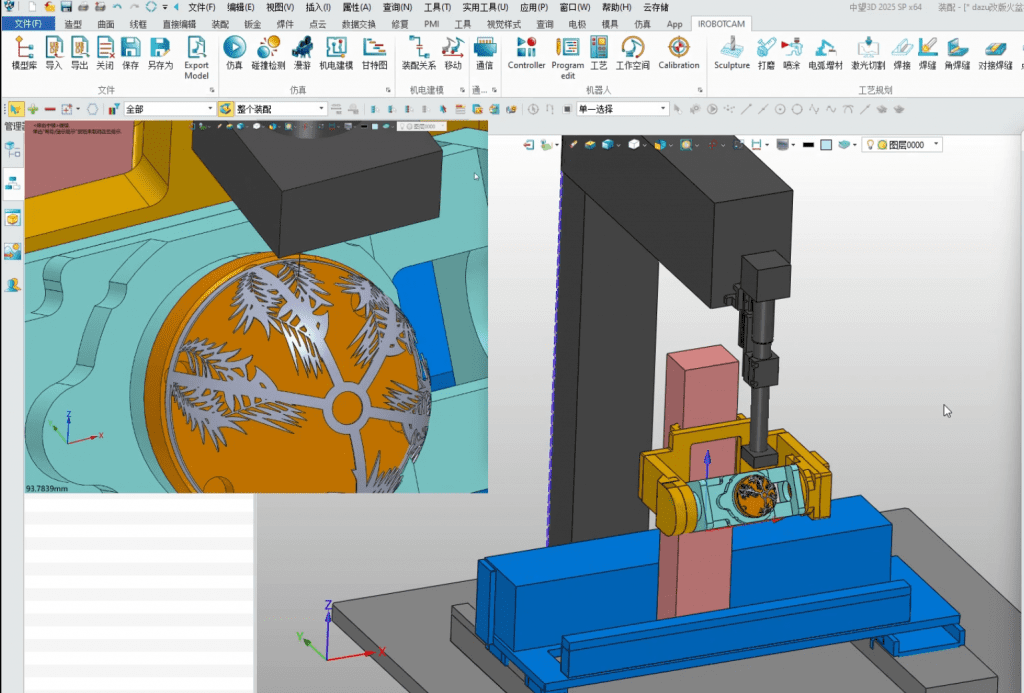
2) Электромеханическое моделирование и имитация движения: iRobotCAM имеет модуль электромеханического моделирования, который можно использовать для моделирования и проектирования производственных линий и виртуальной отладки роботов. Перед фактическим производством процесс лазерной обработки можно смоделировать в виртуальной среде, чтобы заранее обнаружить и решить возможные проблемы, такие как помехи столкновений при движении робота, проверка сингулярности робота, достижимости и столкновения, а также ошибки траектории лазера и т. д., чтобы уменьшить ошибки и риски при фактической отладке и повысить эффективность и безопасность производства.
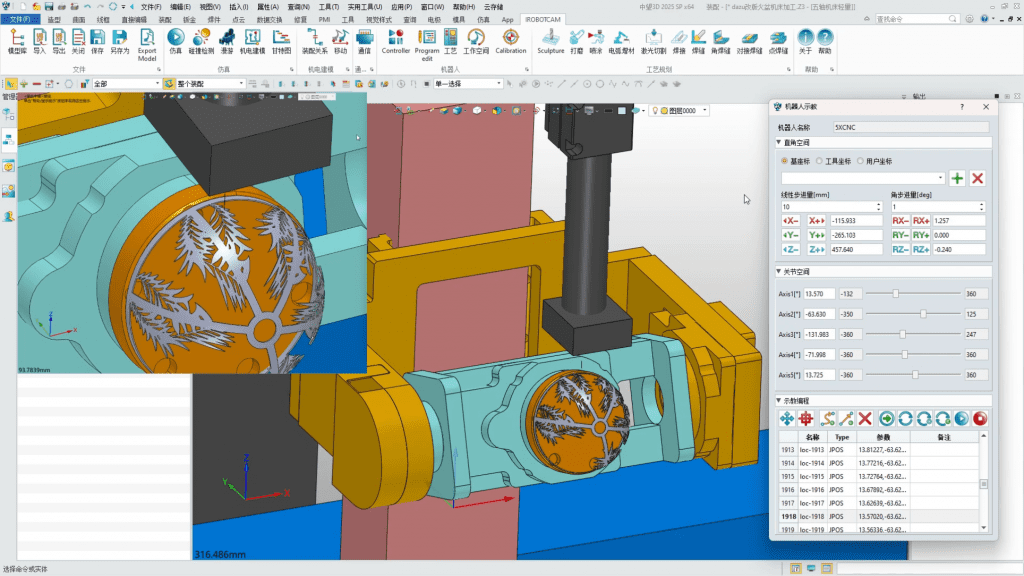
3) Генерация траектории и виртуальная отладка: разработанный на основе платформы ZW3D, он может использовать различные алгоритмы траектории ZW3D от 2 до 5 осей, благодаря чему робот имеет точные алгоритмы траектории, аналогичные программному обеспечению CAM во время процесса лазерной обработки, и может точно фокусировать лазерный луч на обрабатываемой детали, реализуя высокоточную лазерную резку, сварку, гравировку и другие процессы, гарантируя качество и последовательность обработки.
4). Постобработка и симуляция обработки: удобный модуль постобработки iRobotCAM может быстро генерировать код и наглядно отображать эффекты симуляции обработки.
Давайте рассмотрим, как iRobotCAM использует 5-осевые станки для лазерной обработки и моделирования:
4. Применение роботизированной лазерной технологии
Роботизированная лазерная технология в основном является высокоточной, и способность достигать высокоточного производства с использованием лазеров является основой для различных отраслей промышленности, таких как аэрокосмическая, автомобильная и машиностроительная, для достижения высокопроизводительного или высокоточного оборудования. Что касается робототехнической промышленности, какие трудности возникают при применении лазерной технологии? Как быстро реализовать применение роботизированной лазерной технологии?
Прежде всего, для технологии роботизированной лазерной обработки общий процесс выглядит следующим образом:
Импорт робота и заготовки> Позиционирование заготовки и калибровка робота> Реализация программирования траектории> Моделирование всей сцены> Вывод кода и обработка роботом
Из вышеприведенного процесса видно, что лазерная технология фокусируется на создании цифровой среды и выводе и моделировании кода. Давайте возьмем в качестве примера программное обеспечение для офлайн-программирования iRobotCAM, чтобы объяснить, как использовать iRobotCAM для достижения эффективного применения роботизированной лазерной технологии.
1) Используя iRobotCAM, который основан на возможностях платформы 3D CAD, можно быстро моделировать оцифровку оборудования и процесса.
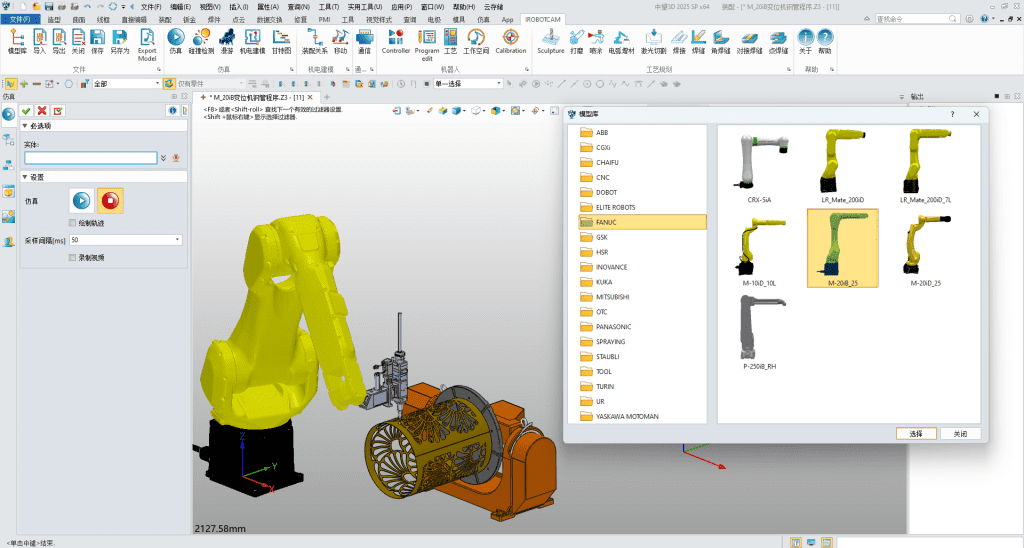
2) Используя библиотеку станков iRobotCAM, вы можете быстро создавать роботов или инструменты, связанные с лазерными приложениями, избегая необходимости повторно создавать библиотеки базовых деталей в будущем и помогая компаниям более эффективно использовать цифровые модели.
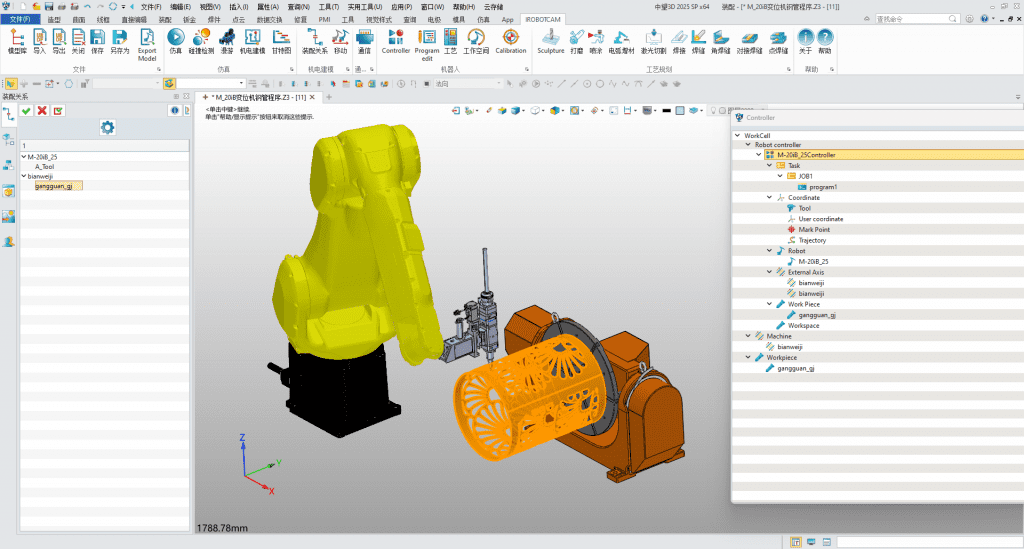
3). Используя уникальную функцию позиционирования iRobotCAM, заготовка может быть быстро и точно позиционирована в соответствии с требованиями лазерной обработки. Более конкретно, iRobotCAM может достичь позиционирования заготовки в различных рабочих условиях на основе CAD-функций заготовки.
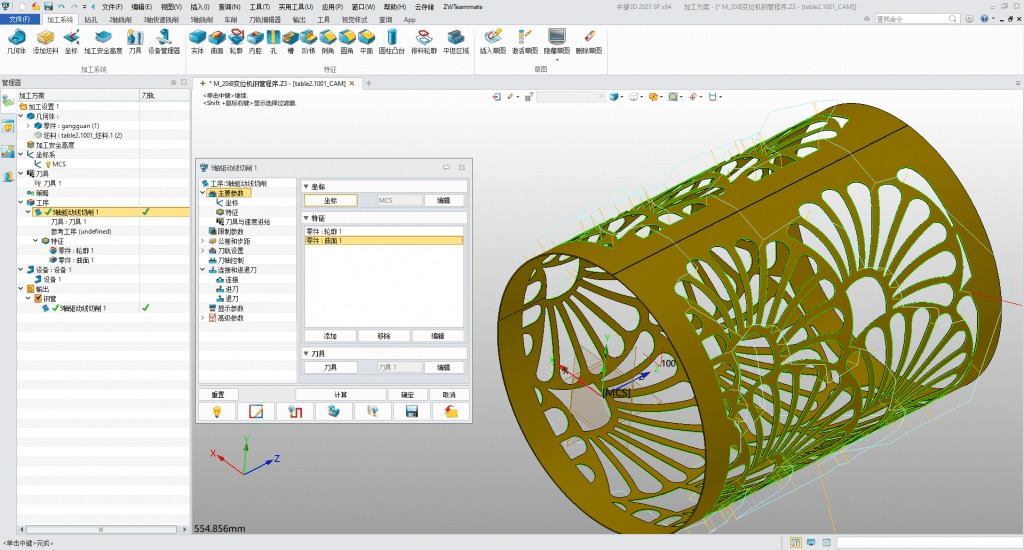
4) Используя возможности генерации траектории iRobotCAM, можно создавать сложные многоосевые траектории на криволинейных поверхностях и реализовывать применение лазерных процессов для роботов с более чем 7 осями.
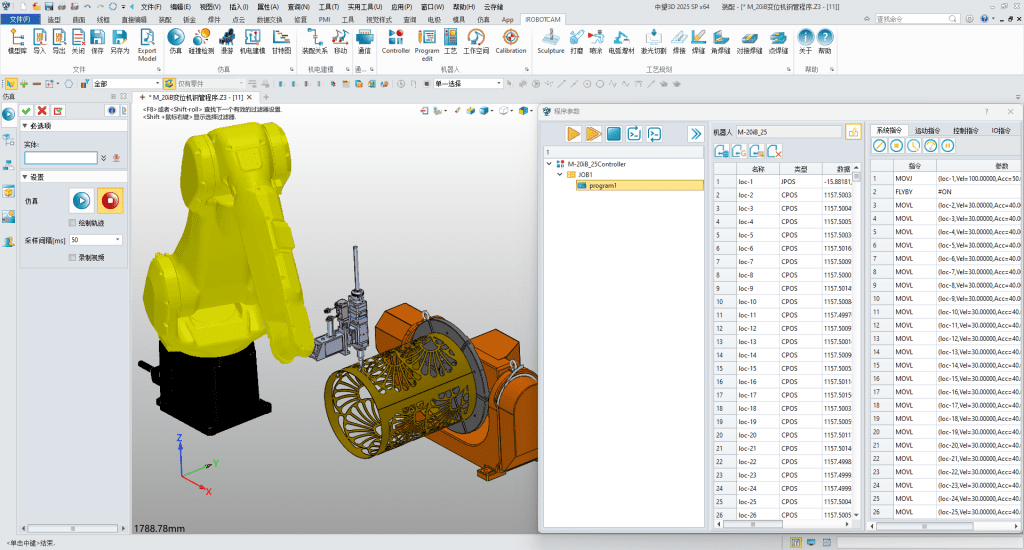
5). Возможности виртуальной отладки роботов iRobotCAM можно использовать для реализации программирования сцен лазера робота и виртуального моделирования, а также для эффективного просмотра эффекта применения робототехнической технологии.
6. Используя возможности постобработки iRobotCAM, вы можете эффективно адаптироваться к различным типам роботов, включая FANUC, ABB, Yaskawa, KUKA, GSK, STEP, Estun, Turin и т. д., а также эффективно использовать один набор программного обеспечения для управления несколькими брендами или несколькими устройствами.
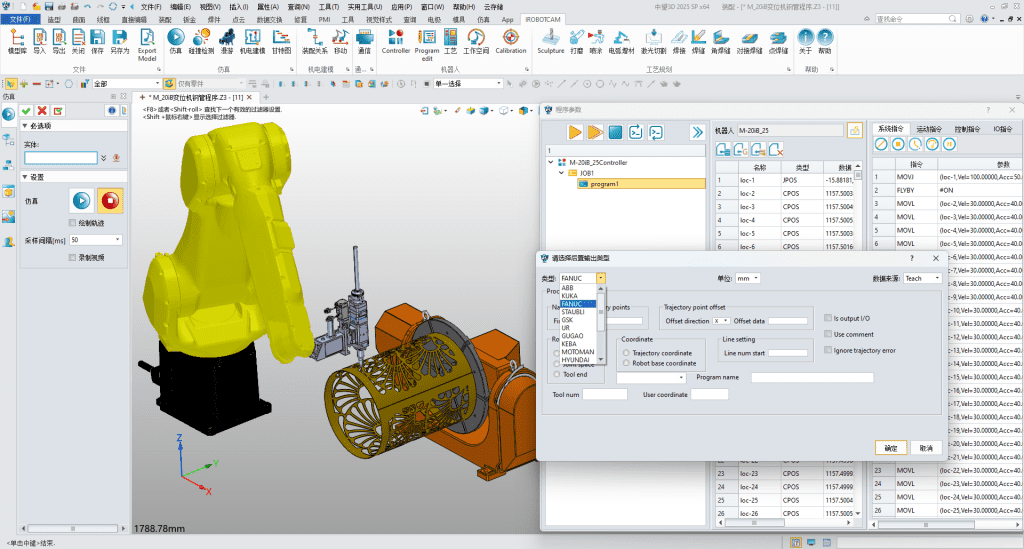
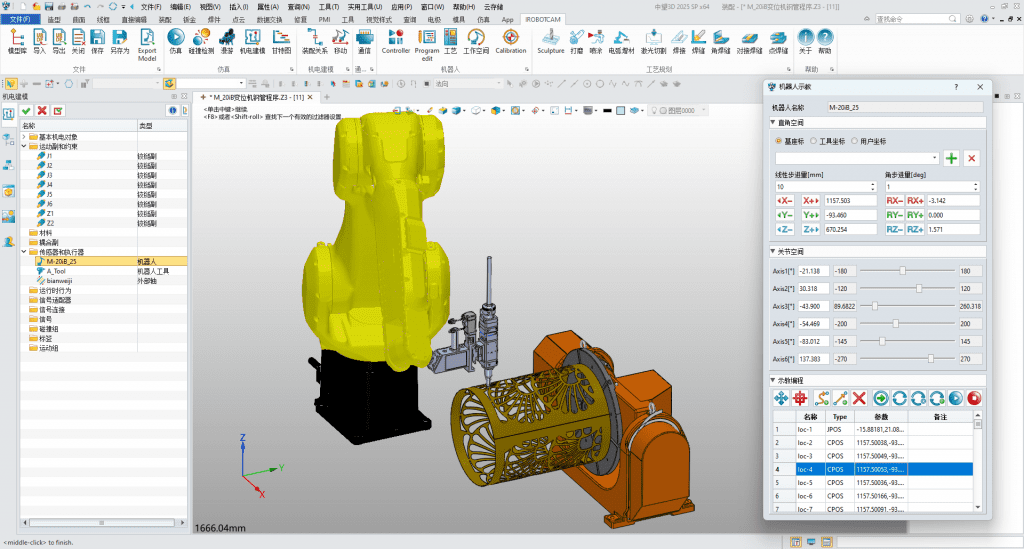
Далее давайте рассмотрим, как iRobotCAM использует роботов для достижения 5-осевой обработки полых шаблонов. Благодаря гибким возможностям программирования iRobotCAM можно достичь генерации 5-осевой траектории и быстрого моделирования робота.
5. Резюме
Суть применения лазерной технологии заключается в точности, что требует программирования и моделирования для высокоточного проектирования архитектуры. С помощью приведенных выше типичных случаев применения 5-осевого лазерного обрабатывающего станка и сценариев применения многоосевой лазерной обработки робота можно увидеть, что выбор iRobotCAM в качестве решения для лазерной обработки и виртуальной отладки может эффективно решить основную высокоточную проблему лазерной обработки. И дальнейшее расширение, как технологическое приложение лазерной обработки, iRobotCAM может еще больше расширить свое применение в большем количестве сценариев, включая лазерную резку, лазерную наплавку, приложения дугового аддитивного производства и т. д. благодаря открытости своей технической архитектуры и отражению своих очевидных высокоточных технических преимуществ.
О компании Yueqing Technology
Компания Yueqing Technology стремится создать открытую платформу автономного программирования роботов iRobotCAM, которая представляет собой цифровое решение, объединяющее электромеханическое концептуальное проектирование производственных линий, моделирование программирования обработки роботов и виртуальную отладку.
Сайт iRobotCAM: www.iRobotCAM.com; Контакты: cooperation@iRobotCAM.com


