Аннотация: iRobotCAM, программное обеспечение для автономного программирования отечественных роботов, разработанное компанией YueQing Technology, ориентированное на прикладные сценарии автоматизации материальных узлов роботов, предоставляет удобный модуль проектирования материальных узлов, который может быстро устанавливать связь с ПЛК и реализовывать автоматизацию в соответствии с потребностями материальных узлов.
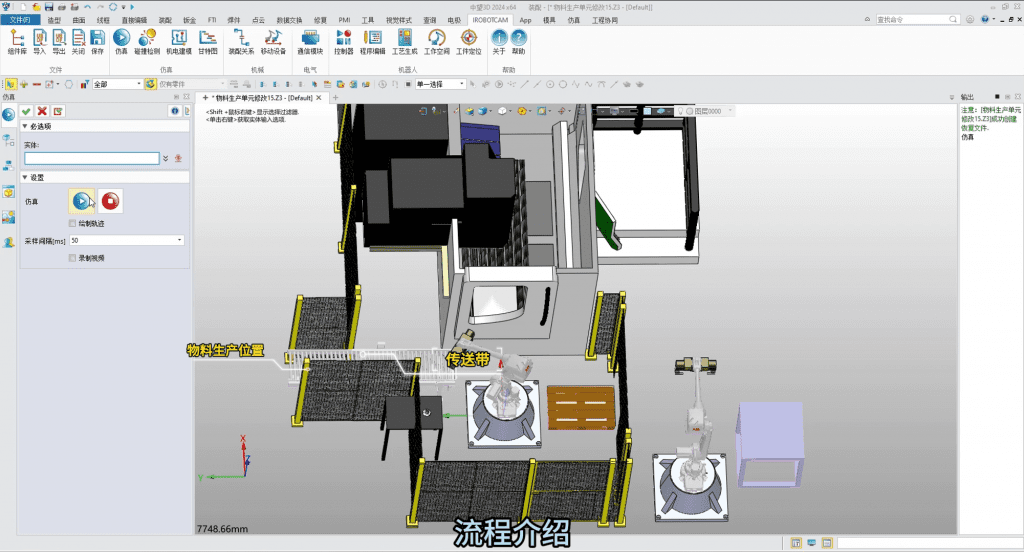
В качестве основы для проектирования и имитационной отладки линии производства роботов, подразделение производства материалов вывело методы проектирования для различных компонентов удобным способом. Возвращаясь к источнику, с точки зрения общего потока материалов, процесс большинства базовых материальных сценариев похож на следующий режим:
- В этой сцене конвейерная лента производит материалы, транспортирует их до конечной точки, обнаруживает материалы в конечной точке, и конвейерная лента останавливается.
- Робот в зоне загрузки получает сигнал на зажим материала на станке для обработки и загрузки, а затем помещает его на конвейерную пластину для транспортировки.
- Робот в зоне разгрузки ждет, пока конвейерная пластина выгрузит материал, и после получения сигнала зажимает материал на столе размещения материалов.
- На входе конвейерной ленты продолжается подача материалов, и робот вступает в цикл загрузки и разгрузки.
Функциональная конструкция очень удобна. Материальный блок способен автоматически генерировать материалы для различных производственных линий. Функциональное окно материального производственного блока устанавливается путем включения производственных объектов, мест производства и производственных частот.
Его возможности расширения функций замечательны. Специально разработанный под требования материального блока, мощный физический движок iRobotCAM может удовлетворить требования моделирования движения нескольких роботов даже в более сложных сценариях.
Возьмем в качестве примера применение загрузки и выгрузки робота. iRobotCAM может быстро реализовать следующие проекты:
Во-первых, импортируйте модель робота в сцену из библиотеки компонентов и соберите ее в робота, отдельно настроив инструменты робота.
Во-вторых, программное обеспечение позволяет добавлять маркеры с помощью обучения методом перетаскивания, а также добавлять инструкции программы робота, тем самым управляя программой робота для выполнения функций загрузки и выгрузки.
Наконец, в сцену можно добавить несколько роботов, а инструкции программы робота управляются контроллером нескольких роботов для выполнения функций зоны загрузки и выгрузки соответственно.
В следующем видео мы подробнее рассмотрим, как iRobotCAM позволяет легко автоматизировать роботизированный узел обработки материалов.
О компании Yueqing Technology
Компания Yueqing Technology стремится создать открытую платформу автономного программирования роботов iRobotCAM, которая представляет собой цифровое решение, объединяющее электромеханическое концептуальное проектирование производственных линий, моделирование программирования обработки роботов и виртуальную отладку.
Сайт iRobotCAM: www.iRobotCAM.com; Контакты: cooperation@iRobotCAM.com


