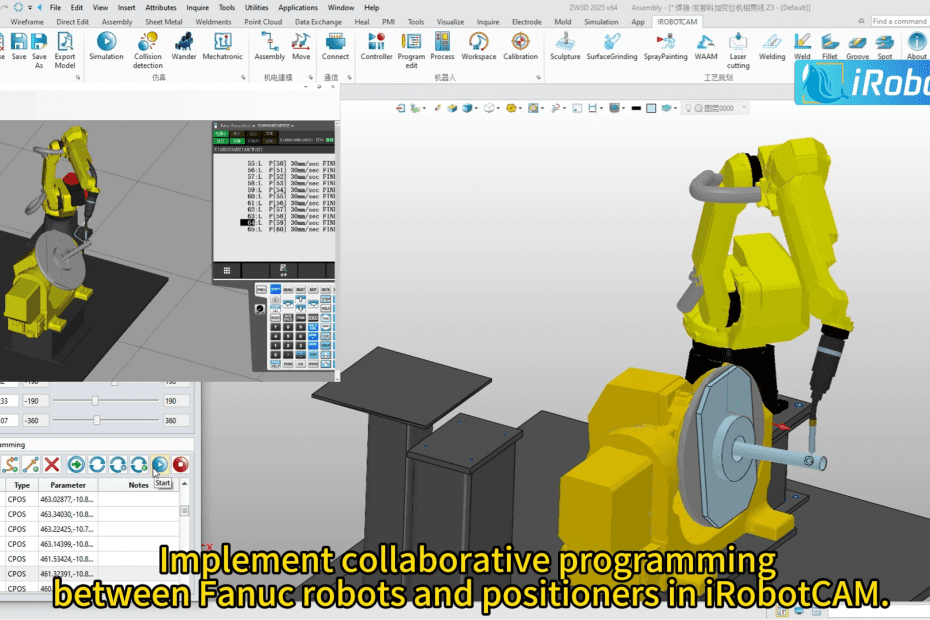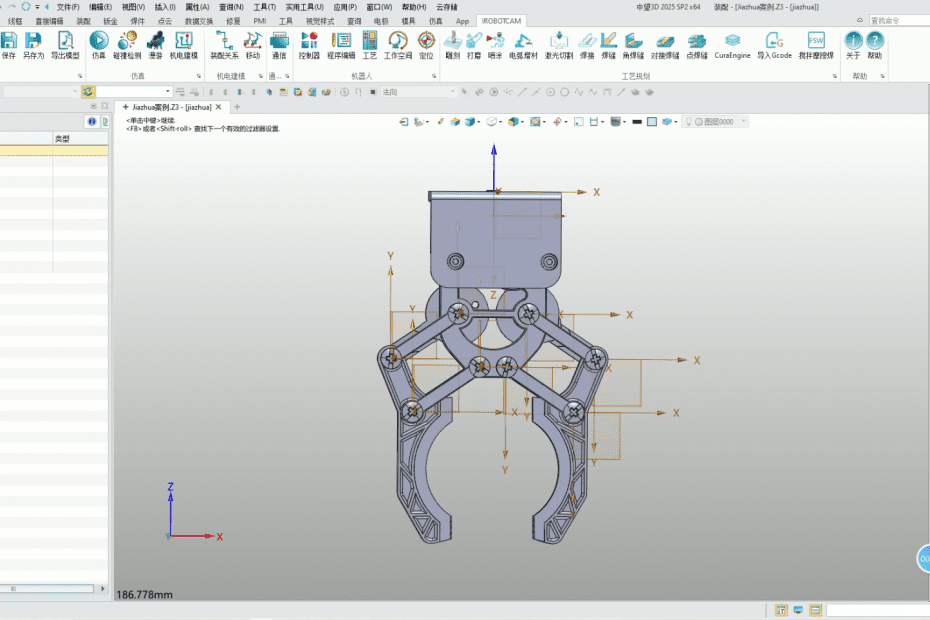
How to Design a Parallel Robot Gripper: iRobotCAM + MuJoCo Step-by-Step
Abstract: Yueqing Technology continues to invest heavily in the research and development of embodied intelligence design software in the field of embodied intelligence. iRobotCAM fully supports the design of serial and parallel robots, ensuring the correctness of embodied intelligence design… Read More »How to Design a Parallel Robot Gripper: iRobotCAM + MuJoCo Step-by-Step