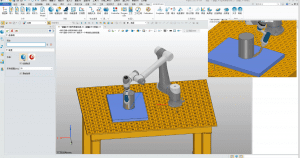
Obsługuje importowanie dziesiątek formatów danych, w tym Solidworks, NX, Catia, Creo, Inventor, STEP, Parasolid itp.;
Obsługuje definicję stawów robota, sterowanie sygnałami itp.
Obsługuje import lub eksport URDF, obsługuje eksport połączeń, bezwładności i innych parametrów oraz ułatwia korzystanie z systemów robotycznych, takich jak systemy ROS lub oprogramowanie do symulacji szkoleniowej;
iRobotCAM posiada kompletny silnik dynamiki, który gwarantuje, że wyjściowy format URDF spełnia wymagania symulacyjne oprogramowania takiego jak ROS.
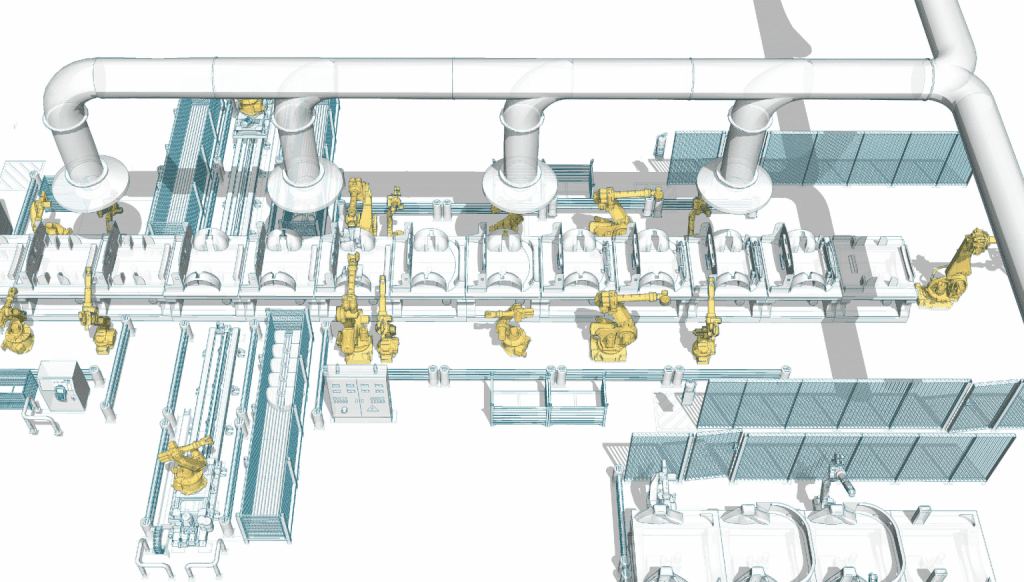
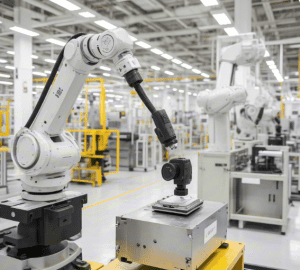
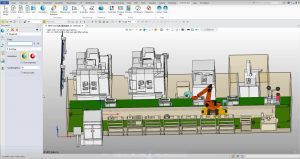
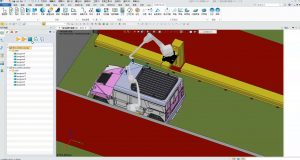
Projekt linii produkcyjnej robotów
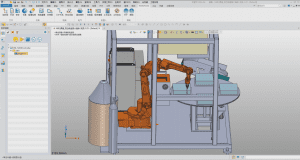
Wykorzystaj oprogramowanie do projektowania parametrycznego, aby sprostać wymaganiom dotyczącym pojedynczych stanowisk robotycznych i linii produkcyjnych robotów.
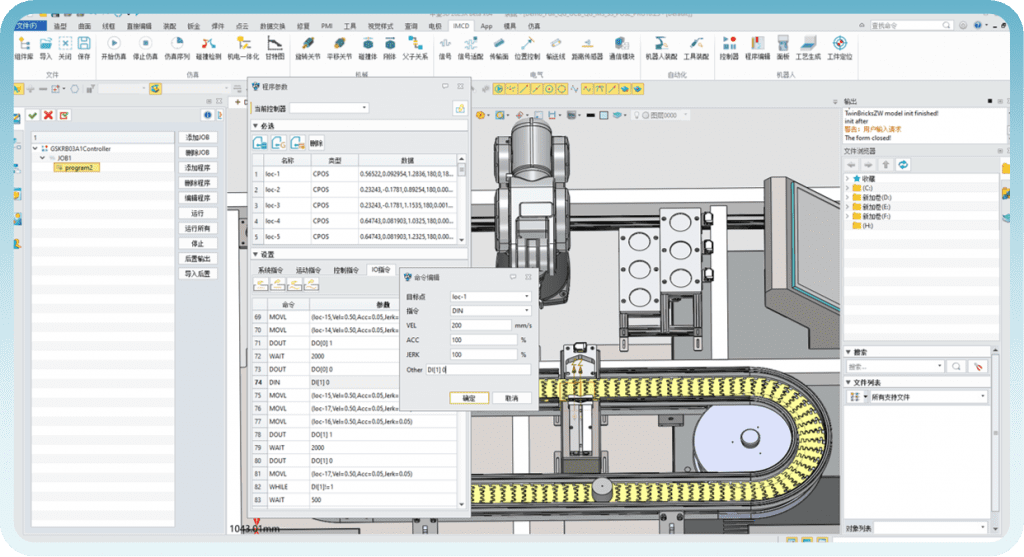
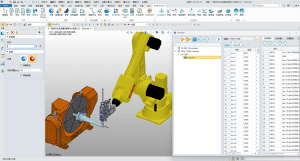
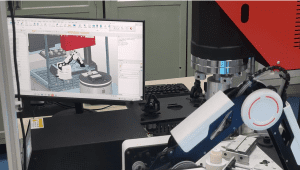
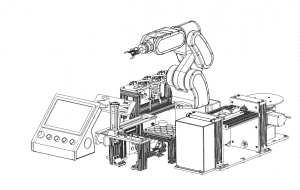
Programowanie robota offline
Proces programowania biurowego: Import modelu robota–>Planowanie procesu–>Symulacja procesu obróbki–>Optymalizacja systemu stacji roboczej–>Wyjście kodu pocztowego
Weryfikacja programowania: Obsługa dekompilacji programu robota, która może weryfikować i optymalizować programy robota
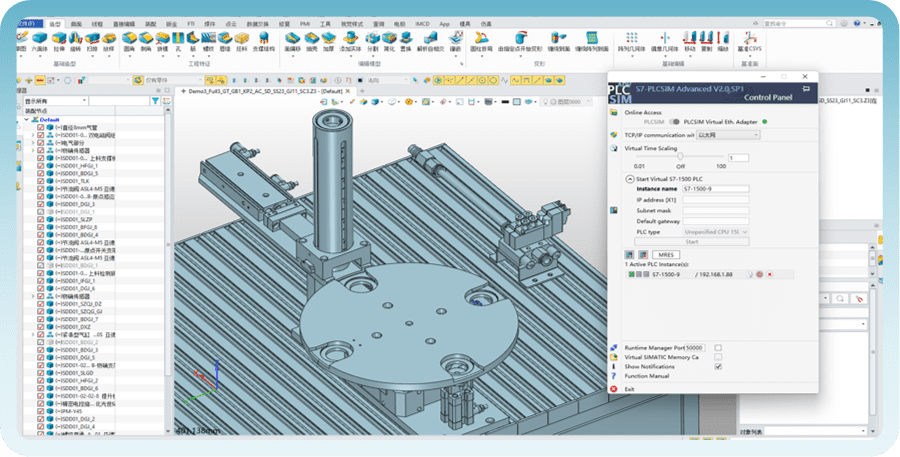
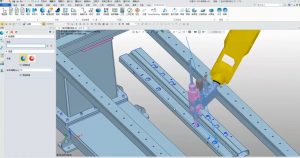
Wirtualne uruchomienie robota
Wyposażony w wirtualne debugowanie i wirtualne monitorowanie, działania wirtualnej stacji roboczej systemu robota i rzeczywistej stacji roboczej systemu robota mogą być synchronizowane;
Obsługuje symulację komunikacji IO wielu maszyn, synchronizację wielu robotów i planowanie połączeń wieloosiowych robotów.