Zusammenfassung: iRobotCAM, eine von YueQing Technology entwickelte Offline-Programmiersoftware für Haushaltsroboter, zielt auf die Anwendungsszenarien der Roboter-Materialeinheitenautomatisierung ab und bietet ein praktisches Materialeinheiten-Designmodul, das schnell eine Kommunikation mit der SPS herstellen und eine Automatisierung entsprechend den Anforderungen der Materialeinheiten realisieren kann.
Als Grundlage für die Konstruktion und Simulationsfehlerbehebung einer Roboterproduktionslinie hat die Materialproduktionseinheit auf einfache Weise Konstruktionsmethoden für verschiedene Komponenten abgeleitet. Zurück zur Quelle: Aus Sicht des gesamten Materialflusses ähnelt der Prozess der meisten grundlegenden Materialszenarien dem folgenden Modus:
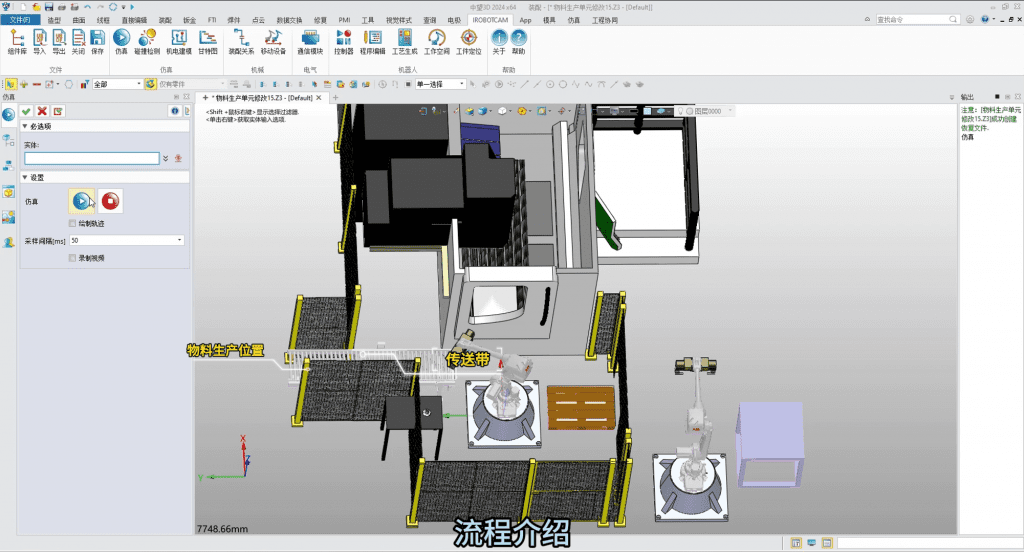
- In der Szene produziert der Eingang des Förderbands Materialien, transportiert Materialien zum Ende, erkennt die Materialien am Ende und das Förderband stoppt den Betrieb.
- Der Roboter im Ladebereich erhält das Signal, das Material zur Bearbeitung und Beladung an der Werkzeugmaschine festzuklemmen und legt es schließlich zum Transport auf die Förderplatte.
- Der Roboter im Entladebereich wartet darauf, dass die Förderplatte das Material heraustransportiert, und klemmt das Material nach Erhalt des Signals auf den Materialablagetisch.
- Am Eingang des Förderbands werden weiterhin Materialien produziert und der Roboter beginnt mit dem Be- und Entladezyklus.
Das Funktionsdesign ist äußerst komfortabel. Die Materialeinheit ist in der Lage, Materialien für verschiedene Produktionslinien automatisch zu generieren. Das Funktionsfenster der Materialproduktionseinheit wird durch die Berücksichtigung von Produktionsobjekten, Produktionsstandorten und Produktionsfrequenzen festgelegt.
Die Funktionserweiterungsmöglichkeiten sind bemerkenswert. Die leistungsstarke physikalische Engine von iRobotCAM ist speziell auf die Anforderungen der Materialeinheit zugeschnitten und kann die Anforderungen der Multi-Roboter-Bewegungssimulation auch in komplexeren Szenarien erfüllen.
Nehmen wir als Beispiel die Anwendung zum Be- und Entladen von Robotern. iRobotCAM kann folgende Designs schnell umsetzen:
Zunächst wird das Robotermodell aus der Komponentenbibliothek in die Szene importiert und durch separates Einstellen der Roboterwerkzeuge am Roboter montiert.
Anschließend ermöglicht die Software das Hinzufügen von Markierungen per Drag-and-Drop sowie das Hinzufügen von Roboterprogrammanweisungen, wodurch das Roboterprogramm die Be- und Entladefunktionen ausführt.
Schließlich können mehrere Roboter zur Szene hinzugefügt werden, und die Roboterprogrammanweisungen werden vom Multi-Roboter-Controller verwaltet, um die Funktionen des Be- und Entladebereichs auszuführen.
Als Materialproduktionseinheit werden wir im folgenden Video weiter untersuchen, wie iRobotCAM die Automatisierung der Robotermaterialeinheit bequem erreicht.
Über Yueqing Technology
Yueqing Technology hat sich zum Ziel gesetzt, eine offene Offline-Programmierplattform für iRobotCAM-Roboter zu entwickeln. Dabei handelt es sich um eine digitale Lösung, die die elektromechanische Konzeption von Produktionslinien, die Simulation der Roboterverarbeitungsprogrammierung und virtuelles Debugging integriert.
iRobotCAM-Website: www.iRobotCAM.com; Kontakt: cooperation@iRobotCAM.com


