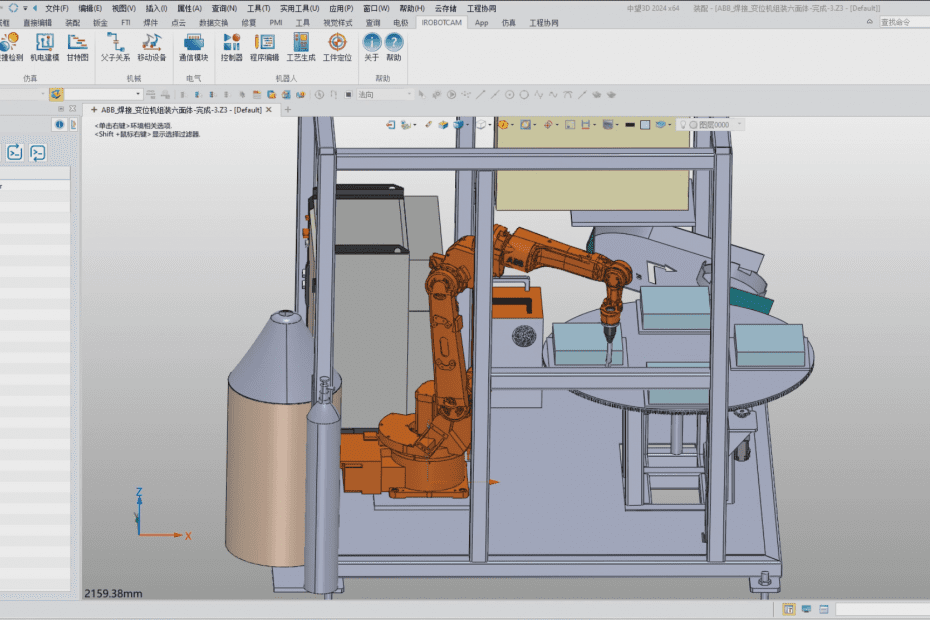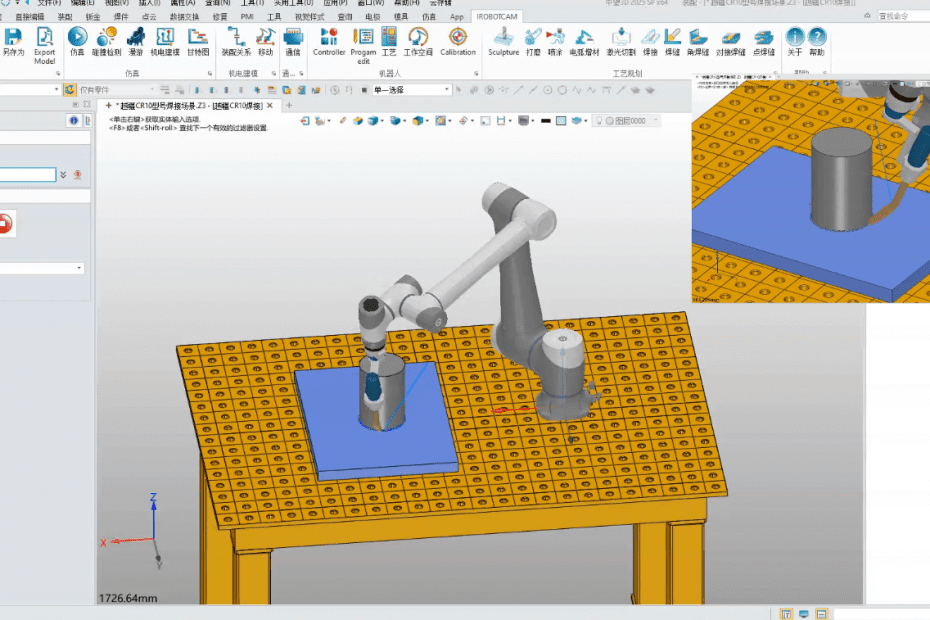
Jak vytvořit rychlé svařovací programování a simulaci pro debot kolaborativního robota pomocí iRobotCAM
Abstrakt: Aplikace kolaborativních robotů pomáhá uvolnit velké množství opakující se ruční práce a výrazně zlepšit efektivitu výroby. Základ různých aplikací pro spolupráci robotů spočívá v programování a simulaci robotů. Prostřednictvím offline programovacího softwaru domácích robotů iRobotCAM lze kolaborativní roboty, jako… Read More »Jak vytvořit rychlé svařovací programování a simulaci pro debot kolaborativního robota pomocí iRobotCAM