2025年5月21日,中望软件在北京举办“中望软件2025年度产品发布会”,重磅产品一个个陆续发布。作为中望的年度产品发布会,集结了中望软件过去研发大投入的阶段性成果,展现了国产二三维CAD、CAE、CAM技术成果,以及中望CAx一体化方案在智能制造、数字建造、信创等领域的典型应用案例,全面呈现了国产软件在提升研发效率、增强设计创新能力和优化生产成本结构等方面的核心能力与应用价值。



南京越擎科技作为中望软件2024年度的全球最佳开发商合作伙伴,也是国内第一个基于国产三维几何引擎中望3D开发机器人工业离线编程软件的开发商,针对目前火热的具身智能的设计与仿真需求,我们采访了越擎科技创始人唐怀磊先生,唐怀磊先生阐述了其在具能智能机器人领域的进一步动作。
“南京越擎科技根据自身在机器人行业的开发经验,将全面延伸iRobotCAM的产品边界,推出iRobotCAM机器人设计与仿真软件,力争成为满足具能智能赛道的机器人设计与仿真的高效工具软件。” 唐怀磊先生表示。
南京越擎科技科技将要推出的机器人设计与仿真软件有何特点呢?
“机器人是一个大赛道,毫无疑问,中国也是全球最大的市场,同时也是机器人未来创新层出的地方,而如何设计机器人,如果我们搜索一下机器人设计,URDF等关键字眼时,我们将会得到一些非常复杂的答案,用户为了将一个机器人模型导入到ROS机器人系统,需要设计模型,调整关节,检测错误,修正数据,导出URDF,而由于一点点错误,可能一个机器人的关节信息都难以到达ROS机器人系统,或机器人训练软件。“ 唐怀磊先生进一步点明目前机器人设计上的用户痛点并阐述其在机器人软件应用上的思路。
“相对于AI的大发展的今天,机器人工具软件的这套方法,是一套由于机器人设计软件的不成熟,通过种种妥协而建立起来的工作方法。而越擎科技针对具能智能机器人大发展的今天,i将会推出全新的iRobotCAM机器人设计与仿真软件,工程师的智慧应该集中到具身智能的应用上,实现具能智能的突破。”

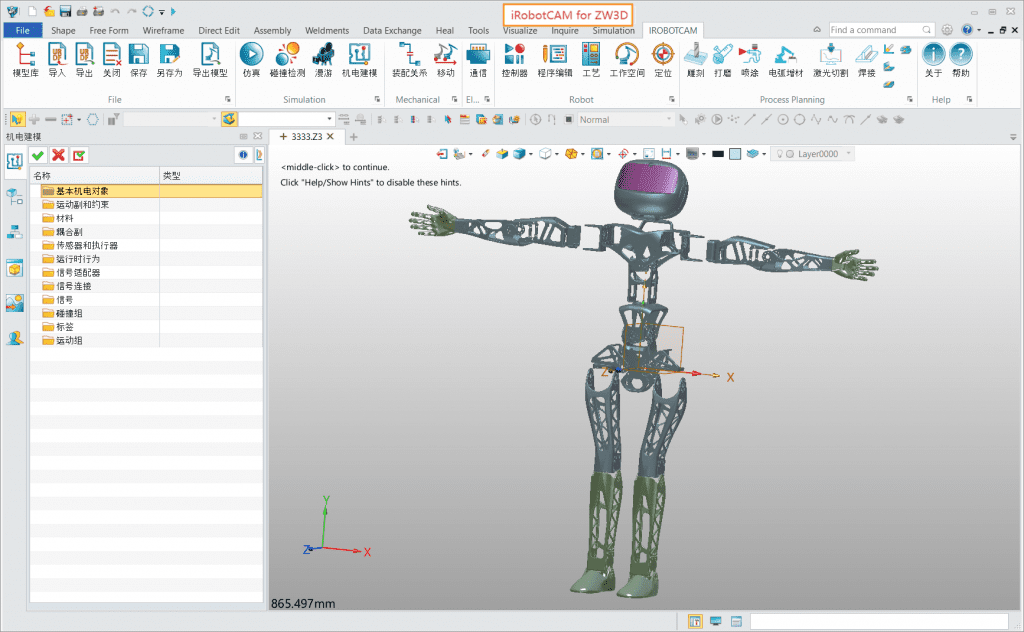
唐怀磊先生进一步阐述了iRobotCAM机器人设计与仿真软件的关键能力,更具体的讲,基于全新的中望3D 2026,越擎科技构建了上百万行代码,将会具备哪些功能呢?
● 支持导入包括Solidworks, NX, Catia, Creo, Inventor, STEP, Parasolid等数十种数据格式;
● 支持机器人关节定义,信号控制等,并在软件中做仿真分析,保障机器人的设计质量;
● 支持URDF导入或导出,通过导入URDF,机器人可进行针对性的修改,校正设计错误; 通过导出URDF,可将包括关节,惯量等参数的导出,方便ROS系统等机器人系统或仿真训练软件的使用;
● iRobotCAM具备完善的动力学引擎,以确保输出的URDF满足ROS等软件的仿真需求。
“对于具身智能的行业发展,人形机器人只是表现形式之一,主要是人形较易拉近与人的距离,具身智能的发展不仅仅是人形机器人,在更多的工业领域将会出现更多的创新应用,这一块,iRobotCAM已经有所布局,我们也非常兴奋可以投入到这场具身智能的技术变革中,而iRobotCAM在具身智能领域的成果正在分阶段体现出来。” 唐怀磊先生明确了iRobotCAM的战略方向。
关于南京越擎信息科技有限公司
南京越擎科技致力于打造开放的iRobotCAM机器人建模,编程与训练平台,是集产线机电概念设计,虚拟调试,机器人建模与训练等一体的数字化解决方案.
iRobotCAM网站: www.iRobotCAM.com,联络邮件: cooperation@iRobotCAM.com


