摘要: 具身智能机器人行业的高速发展,工业级与服务级的机器人面对着加速进入具身领域的需求,而面对于具身智能的应用场景,如何高效的加速相应产品的开发是行业的共性难题,越擎科技针对具身智能领域,持续加码具身智能设计软件的研发,iRobotCAM全面支持串联机器人与并联机器人的设计,从数据源头上保障具身智能设计的正确性,输出URDF等机器人数据,对下支持MuJoCo, ISSAC等各类仿真软件与训练软件的应用,加速整个具身智能的生态推广。
具身智能的设计应该如何开展,这是很多企业面临的共性问题,越擎科技的机器人设计与仿真软件iRobotCAM正是应这一需求而诞生。我们从简单的设计逻辑出发来阐述下具身智能的设计流程。
- 结构设计:主要是机器部件设计,面向的是固定用途的设备或机器。这是沿用了几十年的设计方法,有其诞生的工业背影,也在过去加速了整个工业设计体系的发展。
- 具身智能设计:主要是机器人运动学为基础的设计,面向的是具备智能能力的设备或机器,如焊接人形机器人,搬运机器人,飞行器,四足机器狗,甚至任何天马行空的设备与机器人。
“具身智能设计的优势在于更快的具身智能设计产品的设计流程,构造出一套有效的具身智能的设计方法论,具身智能的设计并不是替换结构设计的方法,这是一种继承结构设计,并对接机器人的专用的设计方法“。越擎科技创始人唐怀磊阐述了具身智能设计的背后逻辑,更进一步讲: ”上接结构设计,下接仿真数据, 企业无需颠覆传统的设计思路,而是在中间加入具身智能的设计方法论,利用iRobotCAM的有效设计方法,企业向具身智能的行业转型中,将会游刃有余。
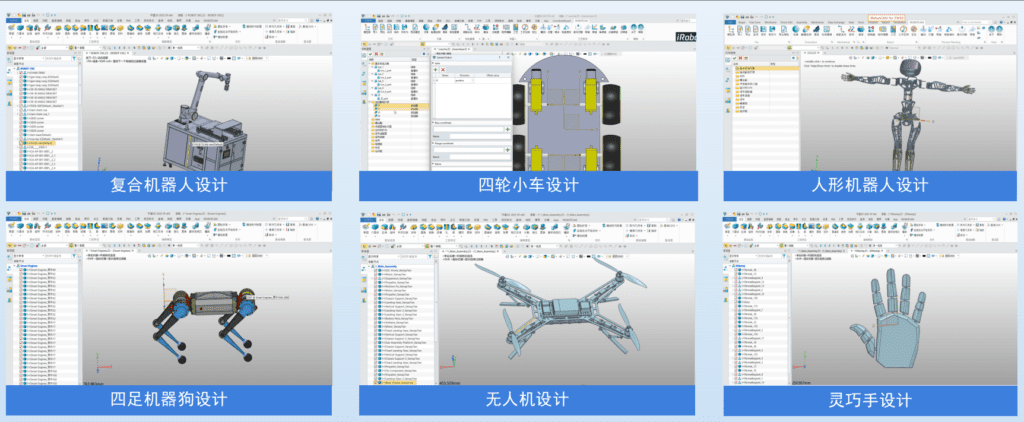
“而针对具身智能行业的高速发展,越擎科技全力支持具身智能转型企业的应用需求,从四足狗的设计验证,人形机器人的设计验证,以及各种特种机器人的设计验证中,得到了非常多的企业的认可,我们也非常期待着具身智能在各个应用场景的成果的陆续体现,见证新的具身智能时代的到来”。 越擎科技创始人唐怀磊阐述了对于行业发展的期待。
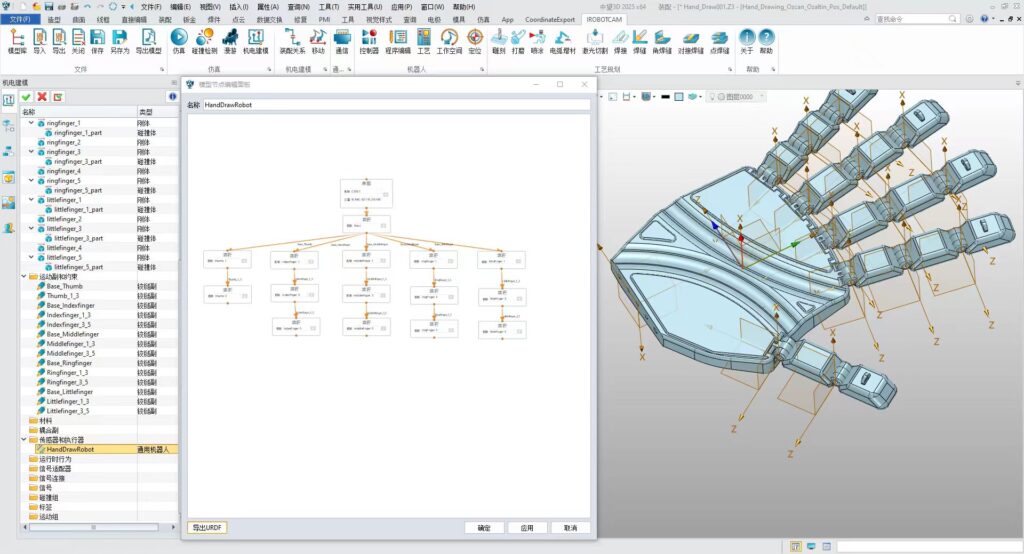
”iRobotCAM的重磅更新,发布的iRobotCAM V1.7版本,将全新更新设计流程,简化具身智能的繁琐设计,提供便捷的关节式的设计流程,支持串联和并联机器人的设计,无缝对接MuJoCo等仿真软件“
我们从2025小鹏科技日中看到的人形机器人,就是很典型的并联结构。而针对这种复杂的结构,iRobotCAM可以提供便捷的设计方法,快速的设计包括人形,四足,飞行器等并联结构的机器人,并输出URDF等数据,满足下游的仿真分析,以加速具身智能产品的开发。

关于南京越擎信息科技有限公司
南京越擎科技致力于打造开放的iRobotCAM具身智能机器人设计与仿真平台,是具身智能设计,机电设计,离线编程,虚拟调试的一体化解决方案。
iRobotCAM网站: www.iRobotCAM.cn,联络邮件: cooperation@iRobotCAM.com


